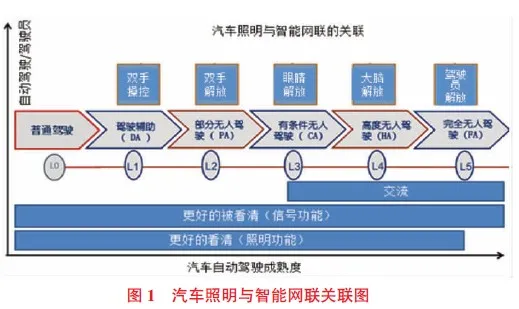
未来车灯如何匹配汽车智能化、网联化、电动化和共享化的发展趋势,一直是行业讨论的热点话题。基于智能网联技术的特征和要求,描述了车灯技术发展的总体趋势,以及其法规的演变,并从电器架构的演变和车灯新技术(前部照明、后部照明和内部照明)的匹配等角度,重点探讨了应对车辆智能网联技术的策略。研究表明,车灯的各种创新技术虽然能更好地满足客户和智能网联的需求,但车灯与整车系统之间的匹配、车灯新技术的可靠性方面仍将是车灯发展的瓶颈,未来车灯新技术研究需要聚焦这些技术难点问题来不断推进。 智能网联汽车即汽车智能化、网联化、电动化(新的能源形式)、共享化技术。在未来的车灯照明中,传统的照明和信号功能仍然起主导作用,交流功能将作为解决车与车、车与人之间相互识别和沟通的重要方式,如图1所示。 智能网联时代,灯光控制模块不再是孤立的灯具电子模块,而是作为整车网络的一个节点,通过与整车之间互联互通,使车灯有自己的“思维”和“灵活度"即只照亮希望被照亮的地方。灯具网联化控制将会成为一个发展方向,并且以自适应灯光技术(ADB)、数字化投影技术(DLP)等新技术为载体来满足用户需求。 车灯的交互设计主要是为特定的汽车应用场景设计最优解决方案。根据多个驾驶阶段的有用信息,做出合理决策和操作,通过摄影、图形、声音等手段,在友好交互界面上体现信息将是车灯信息交互发展的必然趋势。以DLP技术为例,除了照亮应该照亮的地方(通过高精度ADB屏蔽),通过灯光向驾驶员提示信息,比如导航信息路面投射等,让司机更有效地决策判断。 在不影响安全,不违背法规的前提下,开放用户界面的部分设置功能,将个性化配置的权限释放给用户,用户通过本地OTA(空间下载技术)方式更新个性化的配置,比如交互信息触发使能、触发条件等。在车灯方面,为了更好地实现车与行人之间的交流,将开发一套完整的简单易懂的图形语言,并实时将驾驶员的意图(驻车、加速、停车、转向、先行等)以动态的方式显示在前大灯上,便于行人识别和判断。 传统的车灯,主要是“看到”(照明功能用于拓展驾驶员的视野)和“被看到”(信号功能用于提醒其他道路使用者做出反馈)2个方面的功能,这种车灯由于功能单一、照明模式单一,因而驾驶体验不高。 未来车灯将增加交流功能,用于在自动驾驶和无人驾驶情况下,车与车之间,车与人之间的交流与沟通,即通过光信号交流,投射路面标识-投影技术和GIS(地理信息系统)技术交流,实现从传统的“车灯”到“车的眼睛”再到“车的眼神”的巨大转变,如图2所示。 在车灯技术领域,汽车车灯主要标准体系有:中国GB体系、欧盟ECE体系、美国SAE标准以及澳大利亚ADR准则等。中国GB的制定与演变一般跟随欧盟ECE,部分法规滞后于欧盟,比如在ADB(自适应远光)方面的法规,欧盟在2013年已制定了ECER123法规对相关配光要求进行了说明,但中国GB中目前仅有关于AFS(自适应前大灯)的法规。因此,尽早制定相关新技术法规,保持与国外法规同步演变,减少对技术发展的限制,对新技术的开发和普及具有重大意义。 自动驾驶系统(ADS)是支撑无人驾驶车辆的整个系统的集合,其中包含灯光信号等。目前,美国汽车工程学会(SAE)已发布J3134目标,并组织相关专家研究基于自动驾驶/无人驾驶发展背景下,前部车灯的信号符号类别、颜色及位置定义,用于车与周围环境的交流。ECE、GTB(国际汽车照明和光信号专家委员会)已经将该法规的制定列入工作计划。 在中国,与车灯相关的法规项目,如表1所示。这些法规均已开始进入前期研究或立项阶段。 通过整合,全新的《汽车道路照明装置和系统》将作为基于传统车灯和未来车灯设计的重要法规参考。在该法规中,增加了一些全新的概念,如光束调整装置、辅助信号灯(投影灯)、自动驾驶辅助灯、动态转向等,将为未来智能网联汽车的开发奠定基础。摘要

为保证基于智能网联场景的灯光法规更快的制定,相关的场景分析也正在同步开展。法规描述的部分场景,如表2所示。

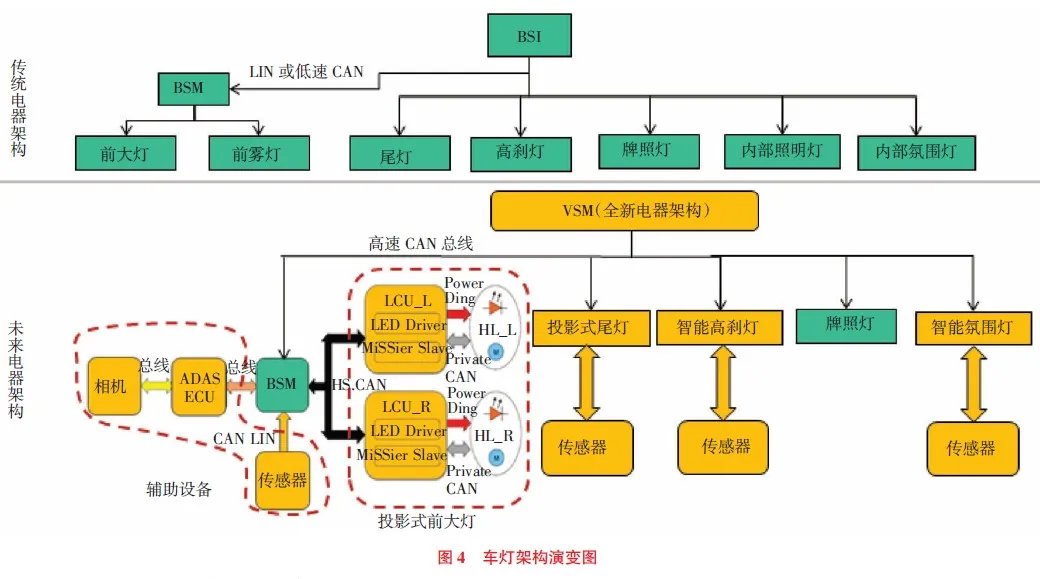
在智能网联时代,汽车车灯将与整车架构之间互通互联,构成密不可分的整体。车灯新技术的演变除了自身技术革新外,车灯与整车之间电器架构的演变也是实现车灯与整车互联互通的重要前提。
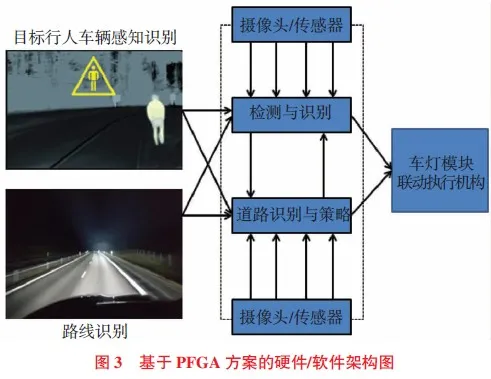
嵌入式系统的开发将是车灯走向电气化、智能化、网联化的必要条件。FPGA(现场可编程门阵列)系统是一种具有高度灵活性、并行性和集成性的计算效率优异的控制系统,在当前很多工业领域广泛应用。基于PFGA的照明系统架构图分为车灯模块,感知模块两大部分,感知模块用于实现目标行人车辆感知识别以及路线识别,这为无人驾驶的实现提供了重要基础。基于车灯控制的硬件和软件FPGA架构图,如图3所示。
整个软件架构需要具备跨平台,以及实时性、图形化、视觉识别、可扩展性、安全性等特征。这对软硬件系统的开发提出了标准化的需求。在设计过程中,通过拆分硬件和软件,创造出一种全新的模块化软件体系,为客户提供一种具有高度动态性和灵活性的平台。
由于汽车照明信号功能的重大演变,使得车灯执行机构更加复杂。当前基于LIN总线的车灯通讯总线,将无法满足高响应的速度需求,因此车灯与整车之间将更多地采用高速CAN总线,甚至是flexray等更高速率的总线来进行数据传输。目前开发的投影式照明大灯用于多种照明模式和信息交互交流,车身单元将增加红外相机、传感器、更高性能ECU等硬件,用于对矩阵式LED系统进行实时控制以及相关符号语言显示。对于尾灯,采用OLED(有机LED)以及功能扩展等技术,信号灯如位置灯、转向灯、刹车灯、倒车灯等基于传感器的信号进行实时投影,提醒道路使用者注意安全,如图4所示。
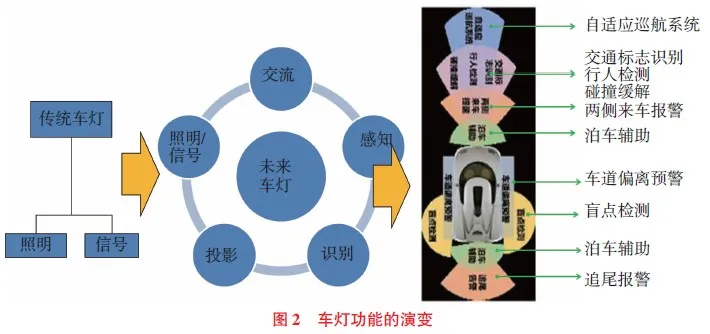
1)DMD技术
DMD技术,即数字微镜照明技术。DMD系统使用DLP(数字投影技术)和微镜阵列来实现。高亮度LED投射至位于光学系统焦平面上的DLP上,处于开启状态的微反射镜将在路面上成像。DLP系统尺寸为1~2cm,分辨率可达到百万级。该技术由美国德州仪器公司提供,奥迪和宝马等车型均已引入。DMD技术不仅在任何驾驶情况下可提供驾驶最理想的照明,还可在车头前方实现各种高识别度的图形指示,例如:结合导航系统,在转弯时预投射出“箭头”图案引导驾驶方向,或是提醒重要交通标志等。
2)μMatrix技术
μMatrix(微型矩阵)解决方案由一颗LED芯片构成,可以分解为1024个独立控制的像素,是一种可寻址像素矩阵式LED大灯。其场平面由LED阵列组成,因此光型可以叠加更改。其优点是由于只有开启的像素耗能,故能耗低。基于这种技术的前大灯,能照亮所有周边区域,能清晰照亮前方车辆,但不会对前方车辆驾驶员造成视觉炫目;高速路面行车时,远光照距会自动提升;夜间行车照明效果清晰,可有效降低事故风险。
3)激光扫描前照灯
该方案的光源是一个高功率蓝光激光二极管。通过快速二维扫描激光束在荧光体上产生特定光型,并通过光学系统投射到路面。通过激光二极管的切换产生多种光型。缺点是扫描激光束和荧光体的超高辐照度耗能较高。iLAS(基于智能激光的自适应头灯)项目正在研究解决该问题。
4)LCD液晶显示技术
该系统由多颗LED组成,通过主光学器件照亮液晶显示板(LCD)。LCD位于物镜的焦平面上。结合前面的偏振器和LCD背后分析仪,每个像素可以在透明和吸光2种状态间切换。LCD前照灯每个模组有25颗LED,每颗LED的最高功率为5W,它们根据光型需求被开启。每个LCD头灯拥有300×100个像素,足以在道路上实现各种投影,且能够达到0.05°的分辨率。
1)OLED技术的广泛使用
OLED即有机LED技术,其发光均匀,分辨率高,厚度超薄,色彩多样化。目前OLED已在汽车信号灯领域崭露头角,但仍面临色彩寿命衰减、成本较高等急需解决的问题。
分层技术(已有量产),是2.5D、3D以及柔性OLED、透明的OLED、更高亮度(红色、黄色、白色)的OLED、多色彩OLED、屏幕化(可需即可见),以及以上各种特征的组合。
2)指示投影技术
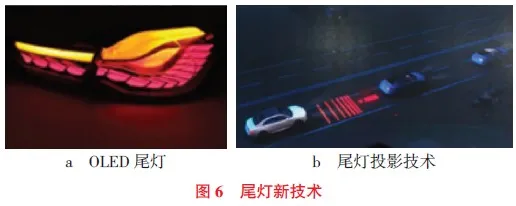
未来的尾灯信号灯将更多地引入投影功能,投影功能的实现主要是基于以下多种场景:停车场倒车转向投影;停车场起步指示投影;在十字路口%交叉路口转向灯的指示投影;行驶过程中行车安全距离的投影预警;车门开启的预警等。OLED尾灯以及尾灯投影技术,如图6所示。
未来内部照明开发主要有以下几个特征。
1)功能化:未来汽车内部照明的主要作用是营造个性化氛围,并时刻提醒用户行车状态。其功能不仅仅是照明,还有警示功能,如提示胎压信号等。
2)集成化:即将不同功能的灯集成在一个灯上,如将氛围灯、功能灯和信号灯集成在一起;氛围灯与塑料内饰结合成为独立的氛围灯;在天窗材料中加一些离子来增加氛围效果等。
1)整车参数设定、悬架系统设计以及制动系统匹配是影响稳态制动点头性能的关键环节,各参数设计是否合理决定了汽车点头性能的优劣,进而直接影响消费者的驾乘体验。
2)基于制动过程中整车以及前后悬架系统的受力特点,通过纵向和垂向受力分析,建立稳态制动点头角数学模型并利用MATLAB的GUI功能开发相应的参数化软件,简化了数学模型的计算过程、降低了计算错误率,有效提高了计算效率和实用性。
3)通过模型计算与试验数据的对比,验证了数学模型的计算精度满足工程设计要求,为悬架系统设计以及制动系统匹配提供了重要的指导意义。
4)通过量化悬架系统以及制动系统参数对稳态制动点头角的影响,得到稳态制动点头角与悬架抗点头(举升)角、悬架(缓冲块)刚度等参数呈正相关,与前悬缓冲块间隙以及前轴制动力分配系数呈负相关,为底盘开发提供理论参考。
文章转自 微信公众号 天津汽车研究所



发表评论 取消回复