
如今,车灯已经实现了超百万像素的分辨率,显著提高了驾驶的智能化和安全性。智能车灯不仅可以通过传感器来收集信息,而且可从云端获取数据,例如在无车道的乡村公路,在车前投影出车道,或者投影出人行道让行人通过。
未来车灯在自动驾驶环境下如何工作,各大车厂和灯厂都有大量的讨论。本篇将重点分析未来自动驾驶环境下车灯的作用。

纵观车灯技术的发展,从单纯的照明工具到今天彰显设计语言的装饰造型,车灯的发展一直紧随时代潮流,并在车上发挥着越来越重要的作用。
随着自动驾驶技术的发展,目前有种观点,认为未来L4和L5级自动驾驶不再需要车灯,车灯作为照明单元已经走到了发展路线的尽头。然而实际上,车灯技术的下一个发展潮流,才刚刚开始而已。因为自动驾驶需要传感器(参考研究院文章:传感器集成-> 传送带),而某些传感器需要车灯来辅助照明。再有,当汽车进入自动驾驶时,也不可能一直在黑暗中行车。如果有行人通过,也要与行人沟通,例如有行人要过马路时,驾驶员会停下车,给行人一个通过的手势,行人才敢横过;在自动驾驶时,由于没有驾驶员,或许需要一个灯亮一下或亮成某种颜色,来告诉行人可以通过。还有与其他车辆的沟通,告诉他们:请注意,我是一辆自动驾驶车辆。
目前全球汽车行业公认的两个自动驾驶分级制度分别是由美国高速公路安全管理局(简称NHTSA)和国际自动机工程师学会(简称SAE)提出的。SAE后期提出分级更为详细,所以现在大家公认的还是SAE自动驾驶汽车分级标准。SAE将自动驾驶技术分为L0~L5共六个等级。L0代表没有自动驾驶加入的传统人类驾驶,L1~L5则随自动驾驶的成熟程度进行了分级。
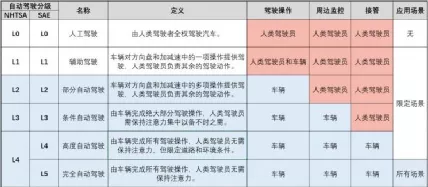
当汽车达到自动驾驶L5级时,汽车就可以在任何时候、任何道路上,不需要任何人工干预地完全自动驾驶。到时协助驾驶的人类感官器官将被各种传感器、技术手段和算法所代替。类似于人类眼睛的视觉摄像头无疑是最重要的,对所有自动驾驶级别都是必不可少的,因为摄像头具有最高的分辨率,可以提供最多的数据,比如物体的形状和颜色以及交通标志的信息等等。这些数据对于精确判断行车环境非常重要。
特斯拉甚至声称,仅需“摄像头+AI算法”,就能完成“自动驾驶”,别说激光雷达,就连毫米波雷达也不需要。而福特汽车公司测试了一个基于激光雷达和毫米波雷达的自动驾驶系统,对福特来说,摄像头和前大灯对于自动驾驶来说是必要的。而百度、华为等国内热捧的自动驾驶大厂,都采用了“激光雷达+高精地图”的技术路线,往L4级自动驾驶迈进。就算是现阶段较成熟的L2级辅助驾驶,也会采用“摄像头+雷达”的硬件配置。事实上,对于一个高可靠性的自动驾驶系统来说,毫米波雷达、激光雷达和摄像头的结合有可能是最好的解决方案。毫米波雷达和激光雷达能够在一天中的任何时间段工作,而摄像头的最佳工作时间则局限在白天。但是摄像头仍然非常重要,因为如上所述,摄像头拥有最高的分辨率,可以提供最多的信息数据,而这些对自动驾驶是不可或缺的。下面我们来分析下为什么摄像头和车灯是必要的。除了造型之外,车灯在自动驾驶车辆中还有以下四个功能。信号功能:车灯可以在黑暗中给其他车辆和行人信号,显示车辆本身的存在。
沟通功能:车灯可以通过在道路上投射信息,与周围车辆和行人进行信息沟通。
行驶轨迹:车灯可以通过提供车道轨迹。给无人驾驶车辆中的乘客带来安全感。
传感器:车灯是摄像头在夜间识别物体、颜色和天气所必需的。
现在我们把重点放在第4点摄像头辅助照明上。因为车灯可以在夜间照亮无照明物体,这有助于对行人的识别。在CNCAP的安全性评分上,识别行人是必须的,在没有任何道路照明的环境中,行人是否被准确识别是安全性的一个重要标志。车灯对于识别自动驾驶环境中物体的重要性,可以从一则自动驾驶安全事故中得到验证。NTSB(美国国家运输安全委员会)的事故报告提供了许多细节。安全事故发生时由于道路照明没有照亮行人,导致摄像头无法识别行人。即便激光雷达和毫米波雷达探测到了一些东西,但是由于信息量不足导致识别错误,自动驾驶车辆没有采取任何行动,从而发生了行人伤亡。
当然,即便有很好的车灯照明,也不能确保伤亡事故就能百分之百的避免。但是有好的车灯照明,起码可以协助摄像头大幅提高对行人的识别准确率。这个安全事故也可以充分证明,摄像头一直是最重要的传感器,因为它具有最高的分辨率,对目标的识别具有决定性的作用。L3和L4级的自动驾驶车辆在夜间不允许自动行驶,但是, L5级是必须的。因此夜间的探测和识别必须和白天一样好。在夜间为所有级别的自动驾驶车辆提供更好的照明是未来数字大灯最重要的任务之一,自适应智能ADB的反应速度必须足够快,匹配摄像头视野的光型也必须足够均匀和智能。如果L3和L4级自动驾驶车辆配备了智能车灯系统,死亡事故率可以大幅减少。而且,与人类驾驶不同,自动驾驶车辆在夜间无需休息。根据高速公路安全研究所IIHS和公路损失数据研究所HLDI的数据,美国有26%的交通死亡发生在下午6点到9点之间,24%的交通死亡发生在晚上9点到午夜之间。从下午6点到午夜这6小时内,产生了超过50%的交通死亡率。理论上L3和L4级自动驾驶车辆更应该在夜间行驶,以降低夜间交通事故率。但是现实情况却是,L3和L4级的自动驾驶车辆目前仍不被允许在夜间自动行驶。因此未来所有L3和L4自动驾驶车辆都有可能配备数字大灯技术。此外,车灯控制系统也可以根据自动驾驶与否切换不同功能,未来高分辨率数字大灯的光型和强度将按摄像头的需要进行精确控制。不同识别要求见下表。显然,L3级或更高级别的自动驾驶车辆需要配备摄像头。但是摄像头是否必须在可见光情况下工作,还是远红外FIR或者近红外NIR就足够了呢?
红外技术最致命的缺陷是无法检测物体的颜色。因此,红外摄像头无法看到交通标志上的文字或施工道路上的黄色车道线。然而,可见光摄像头是可以区分转向灯、位置灯和日间行车灯的颜色差异的。而交通信号灯颜色的识别对于自动驾驶车辆来说是必不可少的。识别道路障碍物,例如车道上遗落的货物,也是自动驾驶车辆的必备功能。这个对红外摄像头也比较困难,因为红外摄像头的分辨率小于可见光摄像头的分辨率,再加上缺乏颜色识别,因此,红外摄像头不足以取代可见光摄像头在夜间的工作。下面再探讨一下车灯对于夜间天气状况探测的重要性。在夜间,传感器必须能够探测到雨、雾、雪以及潮湿和冰冻道路等道路情况。
根据天气情况,自动驾驶车辆应该可以实时调整车速,甚至在最坏的情况下,可以迅速切换到安全模式。因为摄像头和激光雷达的可视能力以及轮胎的抓地力都和天气息息相关。利用摄像头识别白天的天气和路况是可行的。但在夜间,识别要复杂得多,对此的研究也不够充分。但是很明显,必须要对摄像头夜间进行补光。数字大灯可以通过照亮指定区域来识别恶劣天气,可以通过测量反射光的强度来识别雾的大小。此外,雨滴和雪花可以通过流速、颗粒大小和规律性来识别。道路状况可以通过测量道路上灯光的反射率来衡量。
未来的车灯可能会有很大的不同,将成为车与车、车与环境、车与人之间沟通的重要载体,车灯的许多功能将不再取决于光学需求,而是来自摄像头和传感器。高分辨率的数字大灯技术,将增加车辆自身的辨识度和交互信息,光型分布更加优化,以满足传感器和照明双方的要求。要达到安全和舒适的旅行,尤其是在夜间,不仅需要摄像头,而且需要激光雷达和毫米波雷达协同工作,这三者对一个性能良好的自动驾驶系统将是必不可少的。自动驾驶,或许是人类对AI的第一次放权,人们无比渴望解放自己的双手。因此,自动驾驶,总有一天会来的。到来的时候,车灯准备好了吗?
若是有何进一步想法请同我们联系哦。
——The End——






车灯不仅是照明工具,某种程度上也是显示存在,让别人看到你的信号工具。