由上文所述的ADB控制过程可知,实现其对灯光精细化控制的判断条件之一是ADAS系统对于障碍物的检测能力,而相应的由于ADB技术的应用可提升ADAS系统在夜间对物体的识别准度,又在基于两者对传感器信号需求的共性之下,在智驾应用渗透率不断提升的当下,为了进一步降低整车系统成本,业内通过将ADB实现功能与ADAS相关功能进行了融合,让ADB灯光系统成为了ADAS功能应用的组成部分之一。另外,由于ADB作为汽车安全照明的应用体现,此技术在未来汽车自动驾驶中或成为难以分割的一部分。
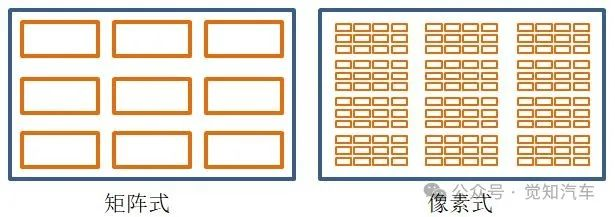
灯光的精细化控制过程使得系统对于车灯光源的物理形态要求必须是具有高分辨率,如想要实现对灯光的分区控制,使用传统的单一光源便无法实现,此时的光源必须多且可独立控制。基于此需求背景,根据ADB技术实现方式的不同,按照光源分辨率可将其分为矩阵式(Matrix system)和像素式(Pixel system)两种解决方案。于物理形态而言,像素式是在矩阵式的基础上进行的细分与优化,因此其在同等物理面积中较之矩阵式LED具有了更多的光源颗粒和发光通道,通过此更微化的LED矩阵组成的像素阵列灯光具有更清晰且更自由可控的显示效果。
但限制于成本、工艺以及相关技术原因,在当前车载ADB的应用中主要以分辨率更低的矩阵式LED为主。矩阵式LED与像素式LED示意如下:
在汽车智能化促使行车安全性进一步提升的背景之下,为加强车辆与行人之间的交互,在某些行车场景中车辆可通过对灯光的精准控制,如在路面上投射的相应图案等,对车外行人起到提醒作用,从而实现‘车联万物’的其中一环。而在此新需求的应用之下,ADB技术由于对灯光控制的分辨率不足等因素无法胜任此任务,因此具备更高分辨率的如微像素LED、LCD、DLP成像等智能车灯技术应运而生。
对于高像素车灯的控制过程与矩阵式LED车灯的控制过程大体类似,都会融合来自智驾系统以及车身控制系统的相关信息,此二者最主要的区别是车灯总成中的光源颗粒数以及对光源控制的灵活性方面。如相对于像素低的ADB而言,具有数万像素甚至百万像素的车灯总成可实现对每个光源的角度、亮度、模式的单独调整,以此实现对灯光进行更加精细化的控制和更高清的显示效果。同时,在部分控制策略中,为了适应车辆在不同驾驶工况下对灯光的不同要求,会对车灯实行左右分开控制或统一控制的不同策略,以此举旨在实现为驾驶员提供更佳的视野。

其中微像素LED(μAFS)是采用尺寸小于100μm的LED 芯片,通过光刻、蚀刻等多工艺的应用,在基板上实现矩阵式CMOS控制电路与芯片的结合,从而实现对微结构下的每一个区域的微LED矩阵进行单独的开关控制及电流调节功能。也正由于该技术方案在应用中可针对不同区域进行微LED矩阵的控制,因此将其称之为可寻址像素矩阵式LED(Addressable LED Pixel Array)技术,其结构示意如下:
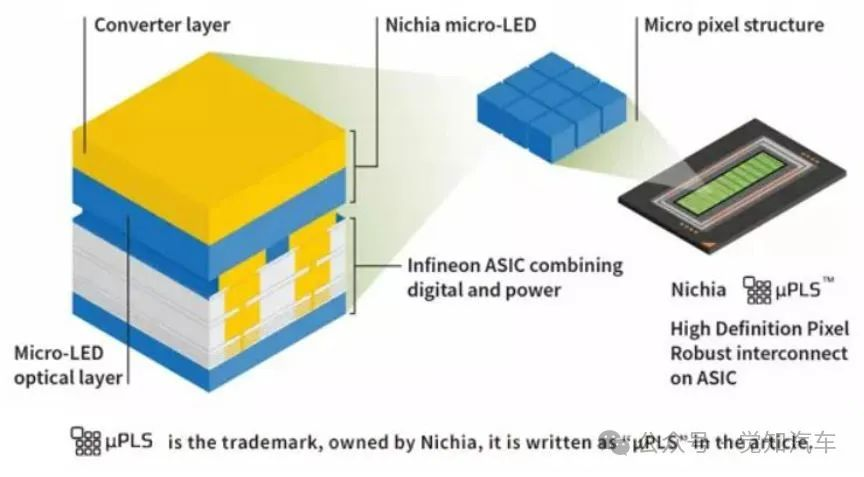
由于μAFS具有比ADB更高的分辨率,可实现对灯光更精准的控制,所以当前该技术已经被大多数该领域的企业所布局。

但尽管基于此技术已能做到在单个LED芯片上实现数万个可独立控制的像素点,可万级像素对于在实现车载灯光的投影、精准光线调节等方面应用而言,其在清晰度、准确性上还仍有进一步提升的空间。为此,一种基于数字信号与光投影的数字光处理(Digital Light Processing,DLP)新技术诞生了,此技术也是在AR-HUD中被应用的技术方案之一。
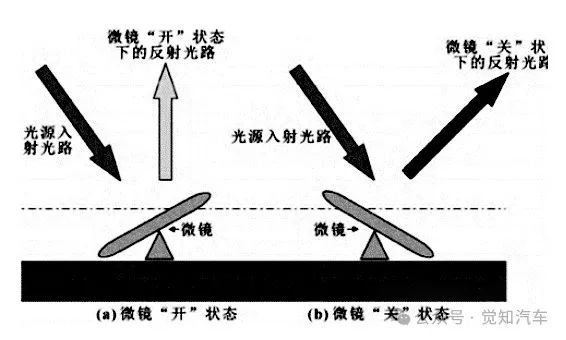
其工作原理是通过数字微镜芯片DMD(Digital Micro-mirror Device)和聚集在其CMOS上并通过微型铰链所连接的上百万个微镜片所形成的微系统,再以信号驱动微镜片在某区域中运动,通过其运动所导致的角度变化来改变光线的反射角度,从而让灯光能在指定区域内形成暗区,再通过对灯光频率的控制,从而实现投影图案的动态显示,以此来对处于光线不足中的行人或骑行者起到提示作用。
以某车型为例,用户可通过对车载系统的设置以选择是否启用灯光提醒功能。
通过启用相关功能后,当车子在导航路线中即将进行转向、变道或路遇行人等情况时,系统便可通过对灯光的精准控制以实现车内外人员对投影图案的可视,效果如下所示:

注:灯光投影技术的应用与AR-HUD的投影并不冲突,AR-HUD投影仅车内人员可视,而灯光投影技术的应用是车内外人员皆可视,且显示内容是提醒作用,是车辆与行人之间交互的一种可视化体现。
另外,DMD技术下的DLP灯光技术由于其车灯总成具有庞大的光源数量,系统能够通过对每个微镜片的控制实现对灯光的高精度调节,从而精准地控制车灯以调节其光线透射的角度和暗区的大小,在尽可能确保驾驶员最大视野的前提下,可对来向行车、人员不造成灯光污染。DLP精准灯光控制与ADB的灯光分区控制对比如下:

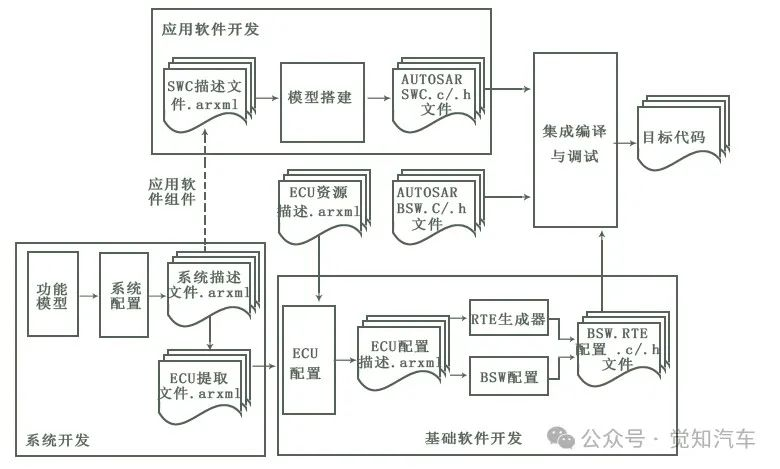
由于车灯控制属于车身范畴,所以通常情况下,其软件架构多是基于AUTOSAR CP进行的开发,应用层通过MATLAB/Simulink进行功能逻辑模型搭建,流程示意如下:
在当前汽车市场中,高分辨率车灯与低分辨率车灯就像是两张不同像素的图片,其应用场景受到技术、成本、环境等因素的限制。在当前已量产的车型中,矩阵式LED(ADB)车灯系统凭借其成本优势主要搭载于中低价位的车型之中,具有较高像素的微矩阵LED车灯系统当前主要搭载于中端车型中,而具有百万级高清像素的DLP车灯系统由于成本较高的原因,主要被应用于中高端车型上。综上所述,对当前技术状态中的汽车灯光技术整理如下:
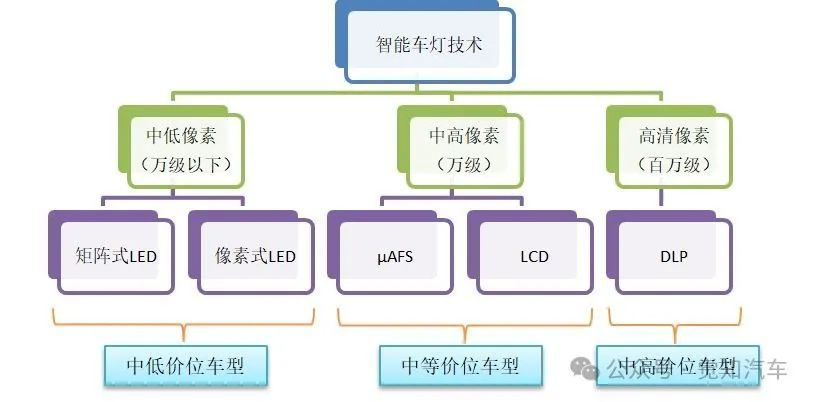
图16 智能车灯特性及应用
文章转自 公众号 觉知汽车


发表评论 取消回复