原创 车灯研究院 leopw

随着机器视觉、复杂传感以及阵列光源等技术的发展,以及市场对智能驾驶辅助功能的需求,自适应远光系统 -- ADB(Adaptive Driving Beam)应运而生。ADB是一种能够根据路况自适应变换远光光型的智能远光控制系统。
相比于传统远光,ADB采用智能控制替换手动切换,使灯光控制更加方便、舒适;同时,防眩目的光型变换替换了远近光切换,在保障道路行驶安全的基础上,极大的扩大了视野照明。
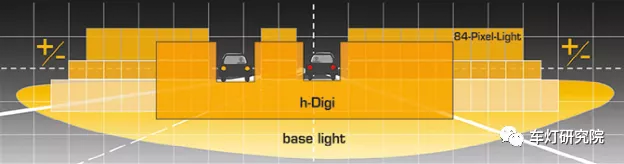
例如奔驰新S-class里的ADB模组配置(参考研究院文章:全新奔驰S-Class大灯拆解->传送带),可以看到大灯内部包含有3个led模块,广角近光模组+84像素模组+DMD模组。3个模组合起来形成完整的远近光光型,广角近光模组(base light)覆盖近车距离的宽度部分,84 h-Digi 模组覆盖的是车正前方的远光区域,包含截止线附加的近光范围。DMD模组处于2个模组覆盖范围内的区域,协助84像素模组一起实现ADB的功能。



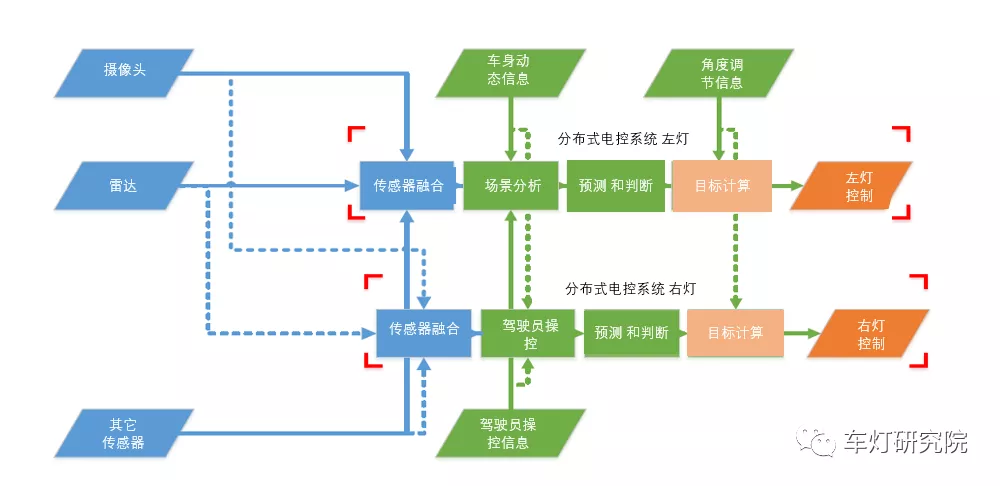
当研发ADB大灯时,整个系统的构架及其与整车的集成也非常重要。如不匹配车身环境,或者信息质量不高,则ADB大灯的性能将大打折扣。本篇将重点分析从信号输入到输出的集成可能性,以及电子信息重要的处理步骤和要求。由于ADB大灯极大地拓展了传统远近光的光型,更好的实现驾驶的安全性和舒适性,避免眩光和干扰。例如,通过环境探测来识别恶劣天气,以便对光型进行调整来减少炫光,同时为驾驶员提供最大的道路照明。因此,使用ADB大灯的主要原因就是过去经常所讨论和关心的安全、舒适、分心和眩光等因素。对ADB大灯来说,一般有两种电子系统架构:一种是有专用车灯驱动模块的集中式系统构架,另一种是车灯驱动模块集成在车灯中的分布式构架。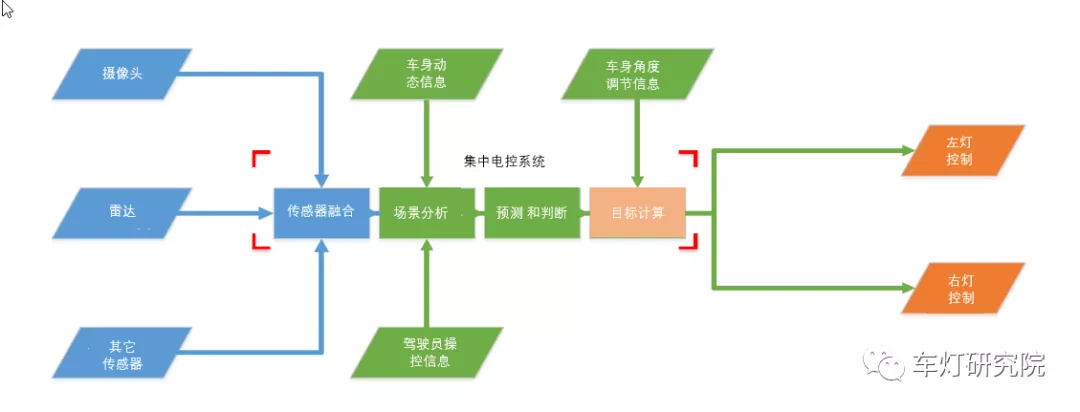
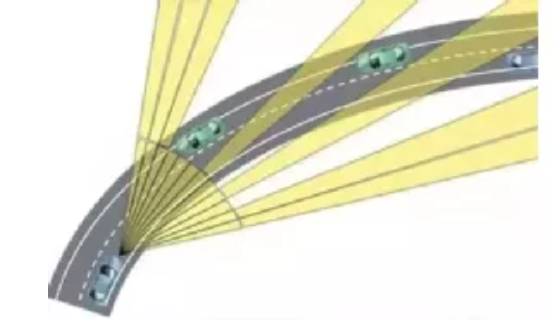
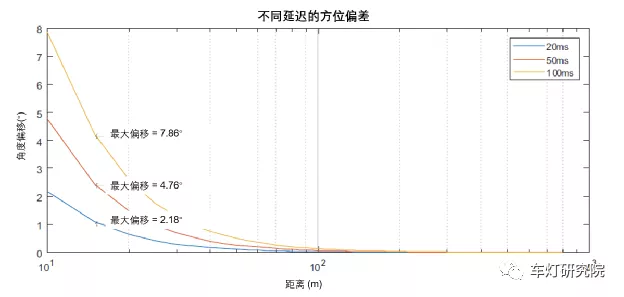
当然如果ADB大灯的输入信息更多,系统则更加复杂,有其它一些混合变体也是可能的,但并不常见。上图将系统架构拆分成不同的处理步骤有助于我们更好的理解。一般将传感器和传感器融合归类为输入端,之后的步骤归类为处理端。对ADB大灯来说,首先要确定的是前方车辆的行驶方向和路径,这是由传感器来完成的。因此道路环境的识别与车身动态信息的计算都很重要。前视摄像头是主要数据来源,同时结合其它车身传感器、激光雷达和地图的信息,此外还有一些额外的信息来源,比如驾驶员的操控方向和车身角度调节信息等。每种传感器都有其特定的工作模式,使用频率和车灯驱动模块的频率会有所不同。如果用传感器的初始输入数据来计算前方车辆,一般会导致计算失真,因为每两次数据更新之间,前方车辆都有位移或道路环境发生了改变,ADB的屏蔽阴影会产生偏差,因此提出了对数据预测算法的需求。在下一次数据到来之前,甚至在未来的几次数据到来之前,提前预测出所需的信息,即场景分析。使用场景分析有利于后续的行为判断。因此,高像素ADB大灯数据处理的重点是提高数据计算能力,以提供准确可靠的信息来生成正确的光型。在ADB系统控制的最后步骤,车灯驱动模块接收到数据,以激活ADB大灯内的阴影光型。接收到的信息一般为水平轴和垂直轴上的强度值,类似于光型图片或帧。由于光强值很大,因此传输的信息数据量非常大。ADB图案的分辨率越高,信息越多,需要传输的数据越多。根据ADB大灯的架构,高速传输所需的接口要么集成到ADB大灯驱动模块中,要么通过高带宽接口外置于驱动模块外。ADB系统电子构架的每个步骤都要考虑几个重要的因素,这些因素会影响ADB的性能和质量。下面我们将详细分析一下这些最重要的因素以及可能的解决方案。对ADB系统来说,延迟是由信号流的各个步骤引起的多个延迟的总和。目前,最大的延迟来源于传感器,尤其是视觉摄像头。夜间行驶过程中,车辆或标志物根据其坐标和运动轨迹进行分类,分类会消耗掉几帧时间。帧的速率越低,传感器的延迟越高。下图解释了延迟会如何影响传感器检测来车方位的偏差。假设来车行驶在笔直的道路上,相对速度为220km/h。偏差为接收方位角的延迟结果。传感器融合接收信息,接口的刷新频率也会产生一定的延迟,以及传感器融合数据处理的时间,再加上后续探测计算、信息传输到ADB大灯驱动模块带来的延迟.ADB大灯输入的每个信号都有自己的信号源,而信号源都是独立工作的。每个信号都有定量和定性2个属性。定量属性比较容易处理,比如测量范围、测量分辨率和测量周期等都可以用数值来表示。但定性属性难以处理,比如识别率、失败率和准确率等。对于ADB大灯,定性属性很重要,因为如果处理不当导致识别不准,极有可能会产生安全隐患。前视摄像头需要环境光来提取信息。环境光的大小极大的影响了识别对象的信息量,从而对识别对象的类型、位置、距离以及路径等多个属性的检测质量产生影响。而对于超声波雷达来说,基于其探测反射的工作原理,识别对象的水平位置可能不太稳定。激光雷达也可能只探测到的物体的局部,而导致物体没有被准确识别。还有传感器识别的最大问题是识别对象在横向方向上一直在移动,这严重影响到ADB的快速对标。所有传感器的最大工作距离一般为200m至250m,只有摄像头的探测距离较远,但距离越远,其识别误差也会越大,尤其是在夜间。目标识别率:目标未被准确识别 ->杂散光,产生眩光的风险
目标识别分类:目标分类错误 -> 杂散光,产生眩光的风险
目标的尺寸精度:位置或距离信息波动过大 -> ADB阴影区域大小不匹配,性能的降低
路面和路径检测率:道路类型或路径判断不正确 -> 场景分析错位,降低ADB性能或动态方位不准。
主车的动态方位:主车动态方位过快,干扰目标车辆速度分析 -> ADB阴影移动太慢,可能有眩光
传感器的数据输出一般会占用大量带宽,而传感器融合需要尽快地接收环境信息,这通常与网络布局相矛盾。使用集中式电子系统架构来进行ADB大灯通信,带宽量取决于接口设计,高分辨率ADB大灯需要单独控制每个像素,会大量的增加信号量,从而增加要传输的数据。如果给定的带宽不足,即便使用最先进的总线系统也将无法工作。ADB系统的光学分辨率也很重要。假设ADB光学系统具有0.1°的分辨率,为了使打到目标车辆的光型均匀且没有杂光,步进电机也必须匹配来形成ADB阴影的动态运动。分辨率越高,ADB像素越小,光型就越容易调节。同时,系统要判断识别对象的下一步动作以及如何补光,分辨率越高,需要调节的阴影区域越小,甚至小到肉眼几乎看不到ADB阴影的移动。前大灯的初始调节一直都很重要,在出厂之前,车厂都会在生产线上把前大灯调节到正确的位置。对ADB大灯来说,没有准确调节带来的影响更大,尤其是眩光风险。为了减少或消除这些风险,一方面,要进行非常精准的前大灯调焦。以往的调节取决于操作工的操作,操作工通过目测截止线并转动调节螺母来移动截止线,直到调节正确。但这些程序容易出错,而且不够精确。总结和展望
如何选择ADB大灯集中式电子架构还是分布式架构,主要还是由整车的E/E体系架构以及可用的接口类型决定的。对高分辨率ADB大灯而言,仅仅依靠传感器的环境识别是不够的,还需要尽可能的消除传感器系统的弱点。增加不同类型的传感器会升高信息的复杂性,但同时也会提高数据可靠性,并提高整个系统的潜力和能力。
展望未来,各种传感器数据处理、预测和场景识别可能会带来车身神经网络的使用。可以设想,利用深度学习算法将这些过程步骤外包到一个独立且功能更强大的单元中去,或者,连接到已经集成的高度自动化驾驶的设备去。在探测范围、分辨率和数据质量方面,自动驾驶技术的发展也会推动传感器技术的进步。同时,前大灯也会帮助视觉传感器提高在夜间的识别率,从而提高整个ADB系统的性能。
第二届车灯评选评委注册正在现在火热进行中,请扫描下面二维码开始吧~





发表评论 取消回复