简介:光探测与测距( LiDAR )作为一种精密的 3D 成像传感器,成为自动驾驶的关键设备之一。通常远程激光雷达安装在车辆前部,靠近前照灯的位置。如果 LiDAR 可以安装在前照灯中,这将对其应用大有帮助,因为前照灯通常结合外壳、外透镜、电子系统、冷却系统,有的还与清洁系统结合在一起。本文希望研究将激光雷达集成到前照灯中的可能性以及可能遇到的问题。计算了前照灯外透镜曲率对激光雷达角度精度的影响,结果表明小曲率半径对角度精度影响很大。LiDAR 安装位置、空间和热相关问题也单独讨论。
引言
随着这些年自动驾驶的发展,传感器也在飞速发展,激光雷达逐渐成为这些传感器中最炙手可热的设备。相对于摄像头,激光雷达可以主动发光,在黑暗环境下优势明显,前照灯为驾驶员或其他交通参与者提供远光近光和信号功能。它们主要设计为对称且垂直居中于车辆上。线束、冷却系统、外壳和调平系统等。前照灯可为激光雷达提供便捷的应用环境,同时不影响车辆美观。本文希望研究将激光雷达集成到前照灯中的可能性,以及在此过程中可能遇到的问题。
车载激光雷达的原理及分类
1、车载激光雷达原理
激光雷达感知系统常用的技术包括调频连续波(FMCW)、结构光、三角学和飞行时间( ToF )等。这些技术的目标相同,但应用却截然不同。ToF因其简单和强大的设置而被广泛应用。TOF可以分为两类:一类是间接飞行时间( iToF ),它将光调制成一定的频率,通过计算发射光和接收光之间的相位差来获取深度信息信号。另一种ToF方法是通过计算时间延迟来捕捉距离,其中光信号发射到周围环境中,反射或后向散射的信号将被检测和处理。dToF是目前车载激光雷达的主流。图 1 说明了dToF和iToF的原理,距离可以通过以下公式计算:
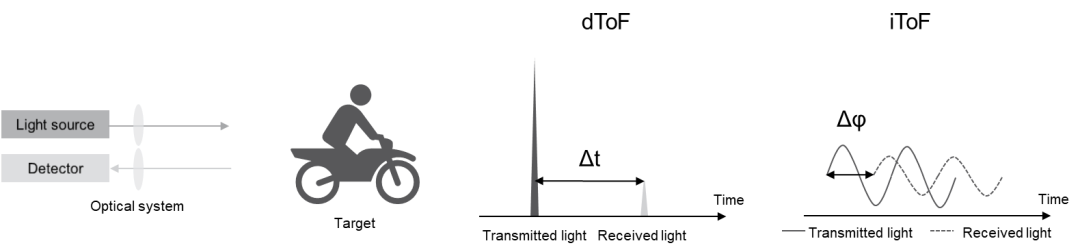
图 1. iToF和dToF 示意图
我的飞行时间:
d飞行时间:
其中d为测量距离, c为激光在空气中的速度, Δt为发射和接收光信号的时间差,Δφ为光的相位差, f为调制频率。
2、汽车激光雷达的组成和分类
许多科学团体和公司已经为不同领域的应用构建了 LiDAR 感知系统。一些系统已经商业化并应用于汽车。使用dToF的 LiDAR 的主要部件包括光源、探测器、光学转向系统、驱动器和信号处理电路 [1-3]。目前,车用激光雷达主要采用激光二极管(LD)作为光源,部分厂商考虑使用更高功率和更好光束质量的光纤激光器以获得更远的测量范围。
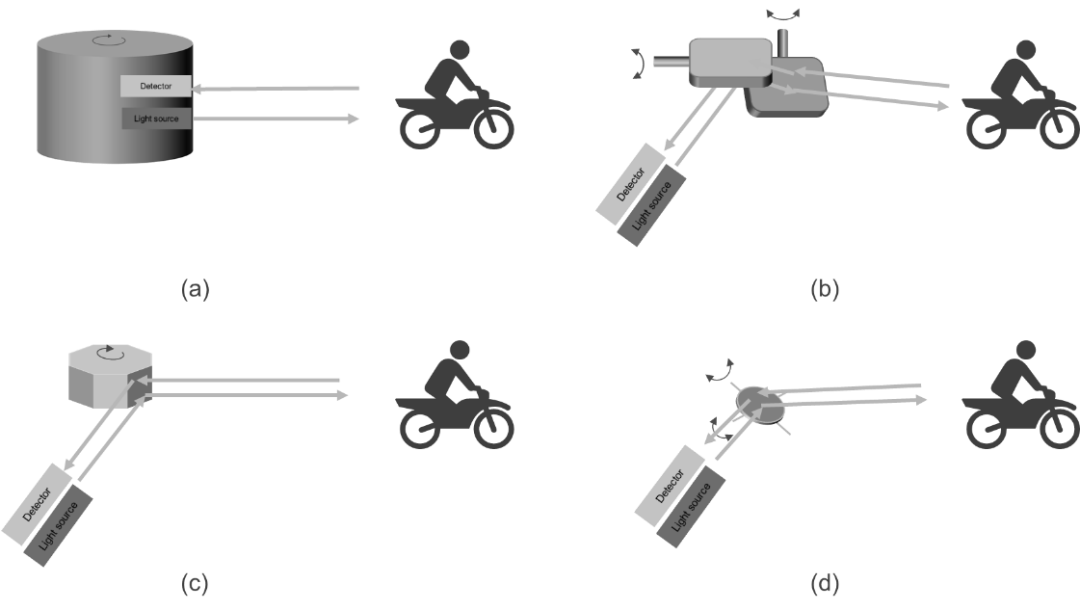
1)机械式
机械旋转镜在均匀的扫描速度下提供线性和平行扫描,是最成熟的解决方案。多个源和检测器对单元沿旋转轴平行放置。机械式 LiDAR 可以实现 360° 连续旋转(通常是水平方向),这有助于获得更高的扫描分辨率。垂直分辨率取决于可用光源和检测器的数量。为了避免激光束的阻挡,通常安装在汽车的车顶上。
2)G振镜
振镜扫描系统一直是激光加工市场的主要应用。并且由于设置简单、成本低、 FoV范围广,也成为了LiDAR的主要途径。可以通过围绕两个相互垂直的轴旋转双振镜来获得 3D 深度信息。
3)多边形
多边形有多个绕轴旋转的反射面,也是一种流行的激光雷达解决方案来实现扫描。该方法的垂直分辨率由不同的反射镜夹角决定或通过增加更多的源和探测器对单元来增强。这样就可以得到等距角度的同心数据扫描线。多边形的扫描模式缺乏灵活性,但大反射镜有利于长距离测距。
4)特快专递
MEMS反射镜与检流计类似,但具有体积小、功耗低、动作速度快等优点。它们通常由压电和电磁驱动,使其更易于集成。然而,MEMS镜面的旋转角度有限,因此在测量广角时,例如需要多组件或鱼眼广角镜头。
图 2. (a) 机械式 LiDAR 简化示意图;(b) 双振镜激光雷达的简化示意图;(c) 多面镜激光雷达简化示意图;(d) 二维 MEMS 反射镜 LiDAR 的简化示意图
LiDAR集成在前照灯中的探讨
1)外镜头
外透镜是汽车造型的一部分,是保护车灯内部部件的重要光学元件,但外透镜的自由曲面也可能影响内部光学器件的光路。下面将讨论外透镜对透射率和精度的影响。
A.透射率
激光雷达的测量范围基于到达目标的光波的往返延迟。范围的最大值直接由激光输出功率决定。因此,需要考虑前照灯外透镜的透光率对功率的影响。图 3 显示了典型的汽车灯罩和外透镜。左侧外透镜,半径较小,右侧较大。位置a 和b 对应两个安装位置。可以看出,由于倾斜的外透镜,位置a处的光与外透镜之间的角度1比角度2大。
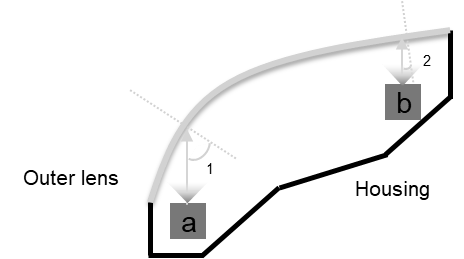
图3 前照灯示意图,位置a和b对应的入射角分别为1和2。
根据麦克斯韦的光电磁理论和菲涅耳公式,光由两个垂直波组成;一种是平行偏振波,另一种是垂直波。反射率可以通过求解以下方程 [4] 来计算:
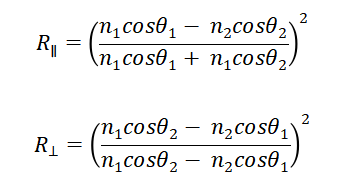
在这里 n₁ , n₂是空气和外透镜的折射率。cosθ₁和cosθ₂项分别是入射角和折射角。R‖和R⊥为平行波和垂直波的反射率。
R为平均反射率, R = ( R ‖ + R ⊥ ) /2如果不考虑界面处的吸收和散射,则透射率T = 1 – R。L aser是高偏振光源,也遵循这个方程。
计算了PC材料外透镜的透光率,给出了入射角与透光率的关系。在图4中我们可以看到在50°内透光率变化不大,但是一旦超过这个角度,透光率就会迅速下降,这意味着在某些倾斜的外透镜中,LiDAR可能会在某些大入射角下影响测量范围的性能面积由于输出功率下降。
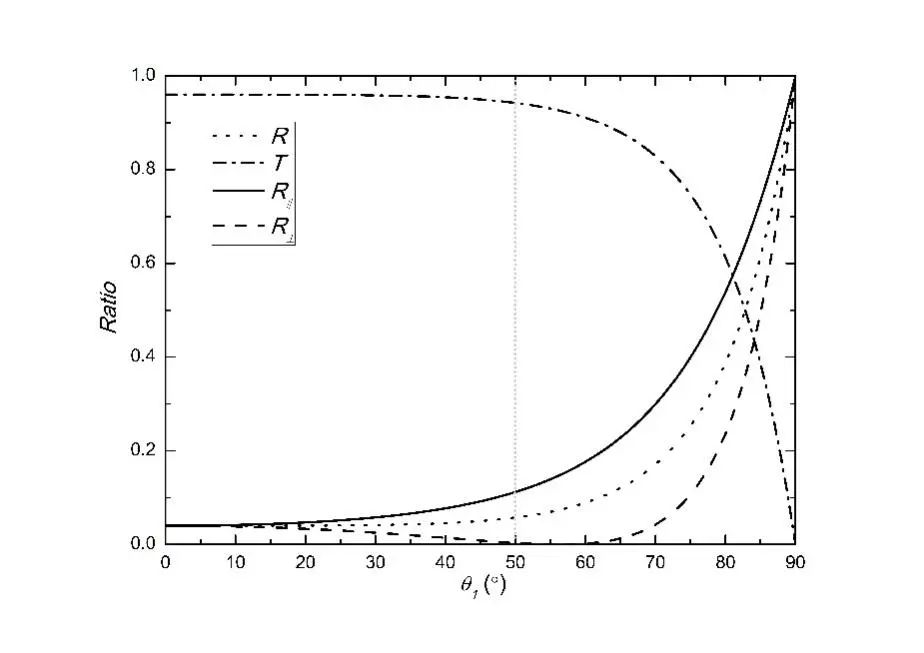
图 4 入射角与全反射率、透射率、平行波和垂直波反射率的关系
B.弯曲半径
前照灯的前照灯外透镜的内外表面一般为两个相互平行的曲面界面。类似于平行板。因此,外透镜会改变 LiDAR 光学系统的光路并引入像差。普通平面平行板不会影响激光的传播角度,但自由曲面会对激光雷达原有的发射和接收光路产生一定的影响。图 5 显示了外透镜曲面的简化模型。
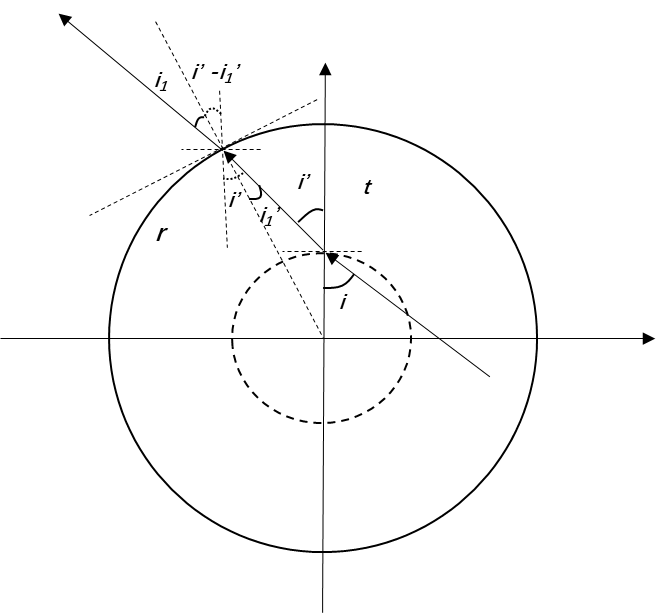
图 5. 光路简化示意图
根据斯涅尔定律,有以下等式:
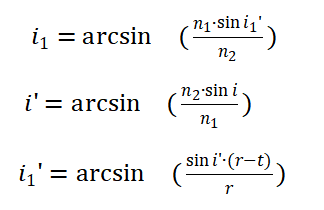
t是外透镜的厚度, r是外表面的曲率半径, i是光的入射角, i'是内表面的折射角, i₁'和i₁分别是透镜外表面的入射角和折射角,n₁是空气的折射率, n₂是外透镜的折射率。
光线通过弯曲的外透镜后会发生偏移,最终折射角与入射角的偏差为Δ=i₁+i'-i₁' - i 。方程可以简化为:

由于光路可逆性原理,发射光路和接收光路会有相同的缺陷,因此计算出发射光路。图 6 显示了不同外透镜曲率半径下角度差与不同入射角的关系。
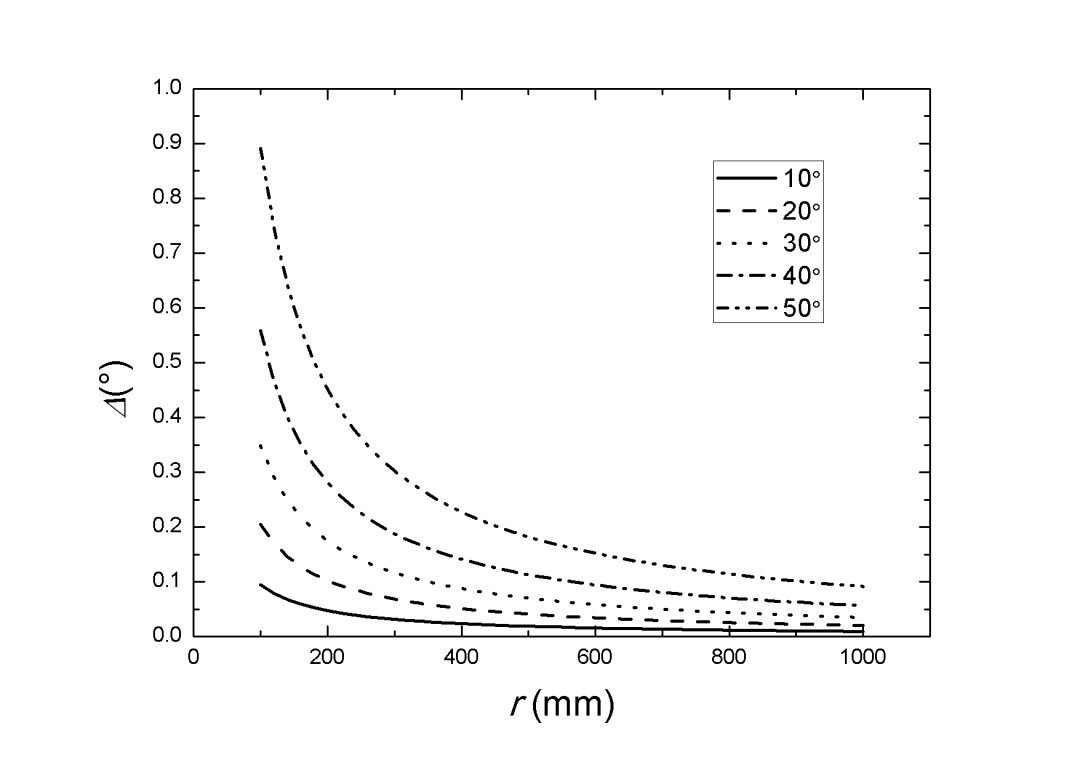
图 6 不同外透镜曲率半径下角度差与不同入射角的关系(PC材料,t=2.5mm)
我们可以看到,当 r = 600mm,对于40°入射角,偏差将超过0.1°,接近市场产品的分辨率。需要光学补偿或软件校正来提高激光雷达的精度。
C.棱镜
信号功能一般要求能见度,即在一定的角度范围内满足一定的光强要求。虽然法规已经将能见度调整到了更合理的范围,降低了位置和转向灯能见度的设计难度,但由于造型或系统布局的要求,仍然可以在外镜片内表面或外表面增加一些棱镜来满足法规要求。这将使激光雷达在相应区域失效。所以,这个问题应该在初步发展状态下平衡。在激光雷达的透明区域也应避免M老分型线和不良表面质量,这会导致类似的输出功率下降现象。
2)热和空间
前照灯是靠近车辆发动机的半密封腔体,发动机运转后零件内部的温度会升高。前照灯中的灯泡或LED 光源在点亮期间也会产生大量热量。激光雷达与光源略有不同。车辆在行驶时,对远距离环境的感知也会随着车速的增加而增加。灯管周围的气流也会加快,有利于降低环境温度,也有利于激光雷达的高性能工作;当车辆在低速或停车时,距离感知的需求降低,灯周围的气流速度也降低。除上述风险外,高温引起的激光波长偏移与发射功率损耗的影响相同,会影响精度并缩短测量范围。波长稳定的LD是解决方案之一。
前照灯腔体通常是一个紧凑的空间,一般包括远光灯、近光灯、转向灯、定位和停车功能、日间行车灯、角灯或全天候灯等。在原有的紧凑空间中添加激光雷达模块的问题可以解决通过以下方式缓解。将远光灯和近光灯的单功能集成或与自适应远光灯集成为双功能或多功能光束是一种有效的方法。共享转向信号灯、位置灯和日间行车灯的光学组件也可以节省空间。适当增加灯的内部空间,不仅可以缓解这个问题,而且更容易获得曲率半径更大的外透镜区域,以降低对激光雷达的透光率影响。
太阳能聚焦是普通光模块热分析的一部分。但对于 LiDAR 模块,一般采用带通滤波器来减少环境光对系统的影响。允许通过的波长范围为几十纳米,可能的聚焦效应影响较小。
3)清洗装置
窗口污染直接影响激光雷达测量精度,因此我们可以看到市场上许多制造商都添加了清洁装置。但相应的设计和集成复杂度增加了。前照灯清洗系统是一项成熟的技术,根据ECE第45号和第48号规定,如果近光灯光源超过2000lm,必须安装该系统以保证前照灯光学性能。增加清洗装置也有帮助以平衡不断增长的光学需求。主机厂逐渐提高了对远光和近光道路照明的要求,为客户提供更好的驾驶体验。这要求道路上的光通量更高,特别是对于纤细的造型。然而,光源光通量的限制使光学设计陷入困境。如果结合前照灯和激光雷达的清洁装置,还可以适当增加光通量,轻松获得更好的道路照明。
4)调平装置
集成在大灯内部的调平系统可以根据车辆的实际倾斜状态调整主要功能的瞄准位置。如果调平系统可以与激光雷达共享,也将有助于动态校正测量范围并提高精度。因此,当激光雷达的性能在可接受的范围内时,将其布置在近光灯附近并集成调平系统也是一个不错的选择。当然,在设计支架时应考虑适当的加强结构和抗震性,以降低重量增加后失效的风险。
总结
前照灯是激光雷达的合理安装位置之一,对车辆流线型设计的美观影响较小,并增加了对外部镜头的保护,允许共享经过验证的清洁系统技术。但是,模块在前照灯空间的排列方式需要根据造型来考虑,以平衡菲涅耳透光率。前照灯PC外透镜对905nm、940nm和1550nm波长具有较高的透过率,对激光光路偏角的影响需要适当的光学补偿或软件校正。该清洁装置技术成熟,有助于降低激光雷达系统的设计复杂度,同时使近光灯光源的光通量超过允许的2000流明,从而更容易提高道路照度。与水准仪的集成将有助于动态校正测量范围并提高精度,同时提供提高分辨率的可能性。激光雷达和灯光功能的功耗相当,可以考虑不同工况下不同功率输出的热管理方式。选择适当增加内侧空间,不仅可以降低集成过程的难度,还可以降低菲涅耳透光率损失的风险。
文章转自 公众号 IFAL



发表评论 取消回复