Toggle navigation
社区
资讯
技术
造型
法规
拆解
视频
技术视频
大咖访谈
新车视频
概念车
改装视频
数据中心
车灯拆解
销量查询
排行榜
文库
文库
活动中心
APP下载
会员
中心
登录
注册
【车灯拆解2305】极氪001大灯
于 2023-06-15 09:19:07 发布
16523 阅读
0 评论
20 点赞
首页
社区
灯具拆解
原创
车灯研究院
极氪001采用了分体式大灯,上方日行灯修饰轿跑的突起线条,显得整个车型前脸运动感十足。主光源部分和前脸中央的封闭式格栅融为一体,不点亮时有扁平化美感。
同时采用隐藏式大灯,内部没有采用过多的装饰件,仅采用4颗小尺寸透镜作为主光源,虽然神秘但又富有科技感,更有透镜本身特有的璀璨效果。
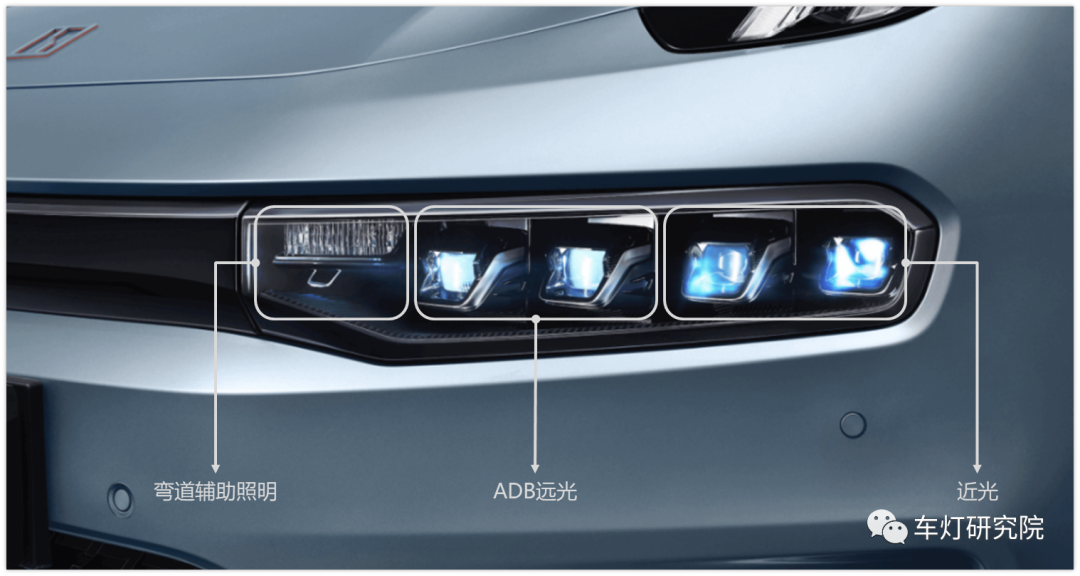
看一下功能分区。靠近翼子板侧的两颗透镜为近光,靠格栅的两颗透镜为远光,在角落还有一个弯道辅助照明。
这次小编们还特地找了一台车,实地测了一下他的灯光表现。各位看官老爷可以看一下下方图片里面的照度参数。
整灯非常细长且方正,装车后裸露在外的面罩部分则更加的狭长。整灯内部除开4颗主光源透镜和一块转向辅助照明厚壁外,剩下是纯黑色的装饰框,把隐藏进行到底。
主装饰框由黑色PC注塑而成,大部分区域为光滑面。而靠下方内测,也就是装车角度目视容易看见的区域由一片片凸起的装饰,并且表面带有亚光纹理。
4颗透镜由4个小装饰框修饰,小装饰框由PC注塑而成,并且有局部镀铝增加质感。
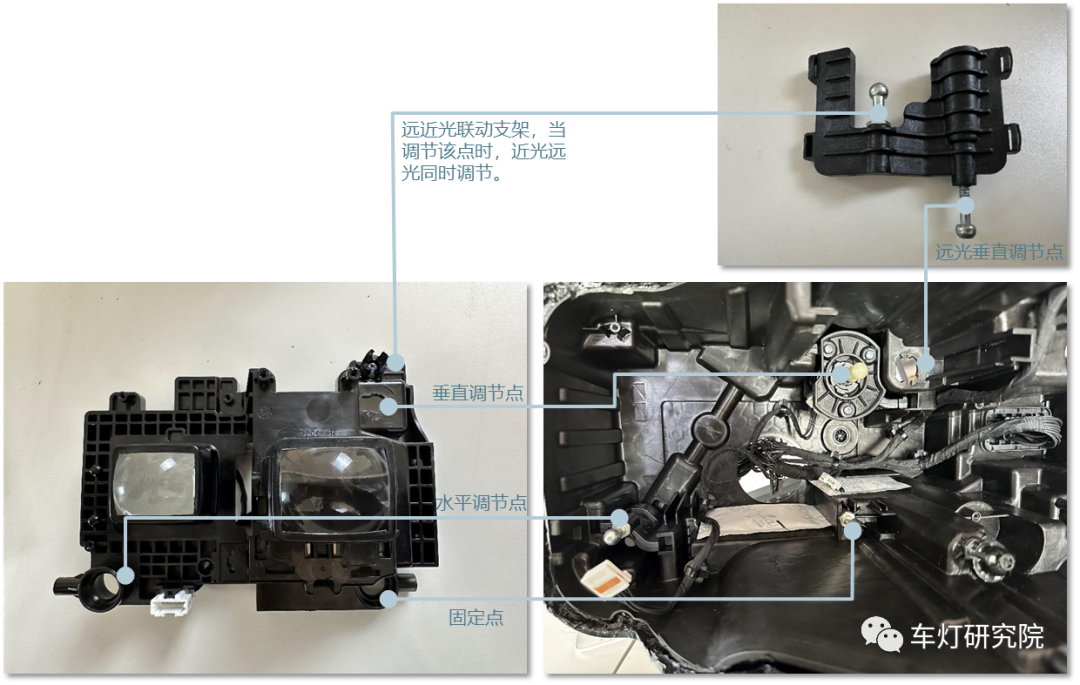
近光的两颗透镜安装在一个整体的黑色支架上。整灯灯壳背后的调节机构只能两颗透镜一起调节。同时有一个联动支架,在调节近光垂直方向时远光垂直方向也会调整。
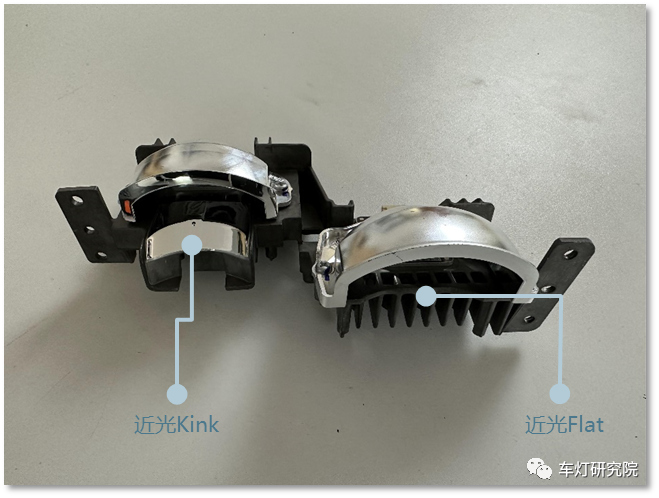
通过反光镜上的突起形状,判断这个椭球是近光的kink椭球,那么另外一个就是近光flat椭球。
在近光flat的反射碗下方,目视有个调节结构。那么可以判断,这两颗近光椭球是提前预装好的,并调节好截止线后,再安装到整灯灯壳。
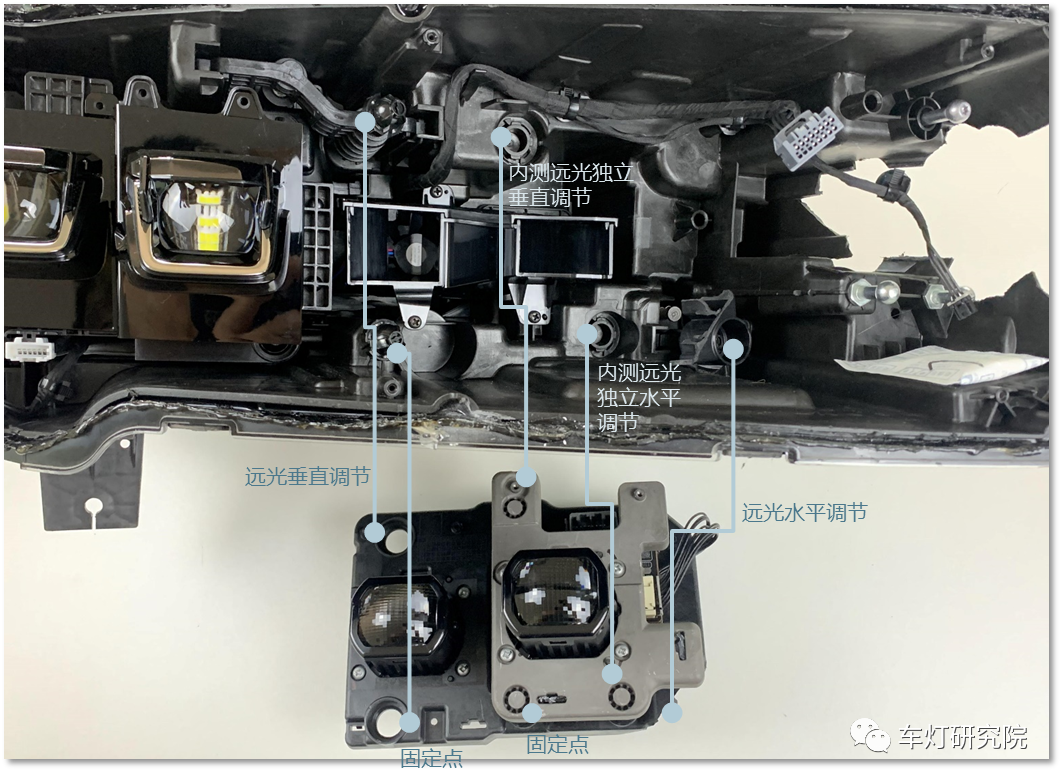
灯壳背后的调节机构可以整体调节两颗远光透镜垂直方向、水平方向。
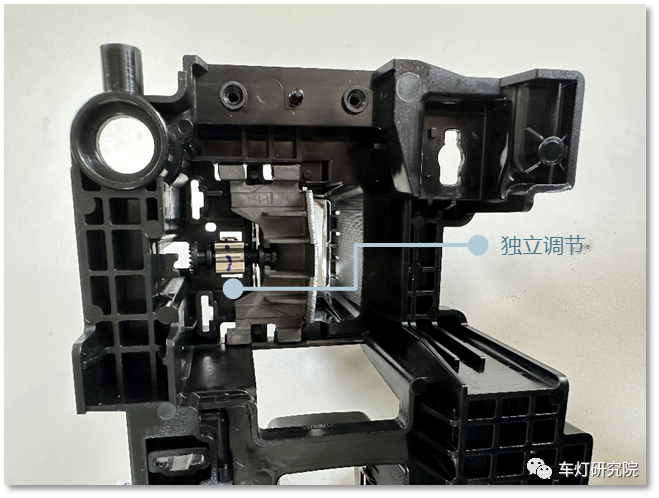
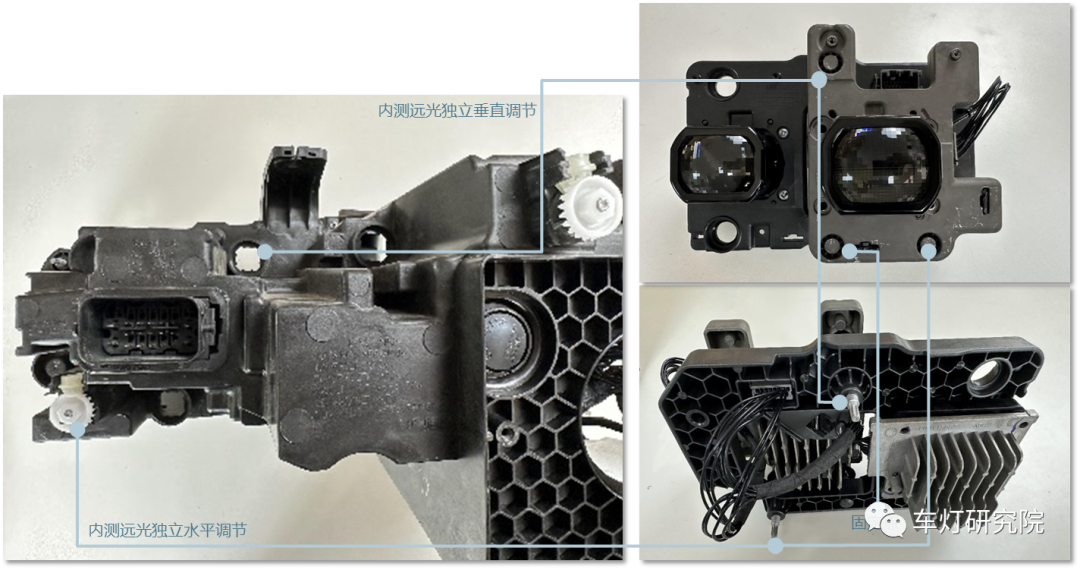
靠近内测的远光透镜支架安装在外侧远光透镜的支架上,所以可以在灯壳外独立调节内测远光透镜的垂直方向、水平方向。
两个远光椭球看起来不一致,但是实际上是同一个椭球,连产品标号也一致。
靠近内侧的远光椭球有三颗固定点,其中位于直角位的固定点无法调节,另外两个球头螺钉背部可以调节。
远光双椭球,拆开其中的任意一个椭球,有16颗LED,基本零件有透镜,壳体,导光硅胶内透镜,PCBA和散热器。
16颗LED,但硅胶内透镜却有17个导光柱,多余的一个导光柱是用来干嘛的呢?
硅胶内透镜被铸铝金属片夹住,固定在PCBA上。
方形的透镜光学面,透镜尺寸30*40,透镜外表面有方形的花纹以增加均匀性。
黑色金属片,临贴部分是金属片本色,可见部分是黑色,安装于透镜支架的内侧下方,推测应该是防止太阳光灼烧壳体。
来一张透镜全家福
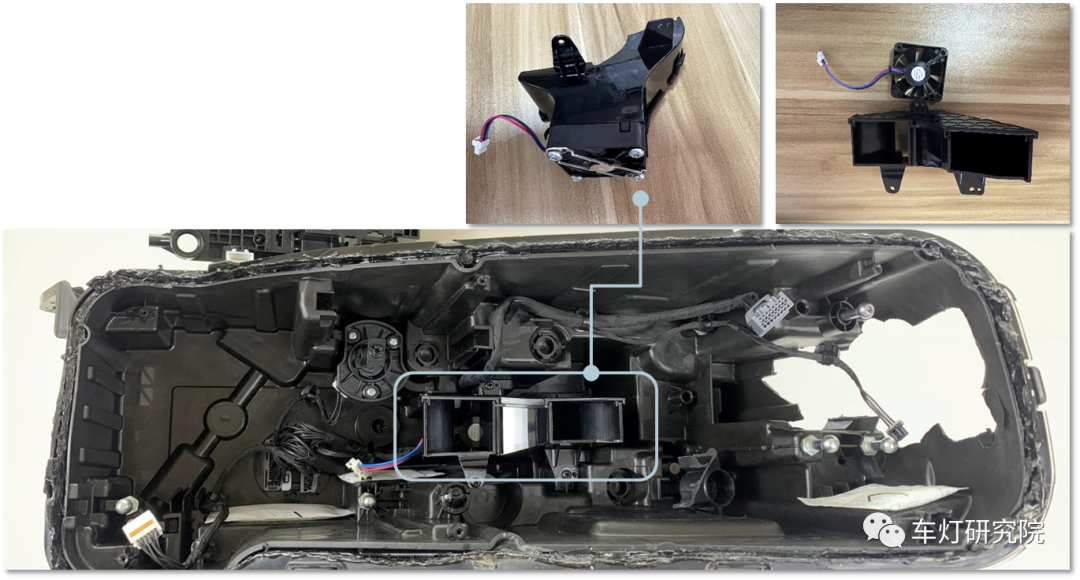
散热系统由一个风扇和一个风道组成,风道的两个出风口对应远近光透镜,相当于是一个低成本的方案。风扇品牌是松下。
方向盘在转向时辅助照明会点亮。
PCBA照明模块上由一块带有光学面的厚壁进行光的打散,同时光学面的突起也和装饰框的突起相呼应。
驱动的尺寸:168*116*26(外壳体),100*150(PCBA)
两个外壳之间采用涂胶工艺密封,非常结实。
极氪001的头灯驱动方案采用目前流行的ECU驱动方案,驱动电路在集成在一块驱动板之上,各功能灯板通过接线连接到驱动板之上。
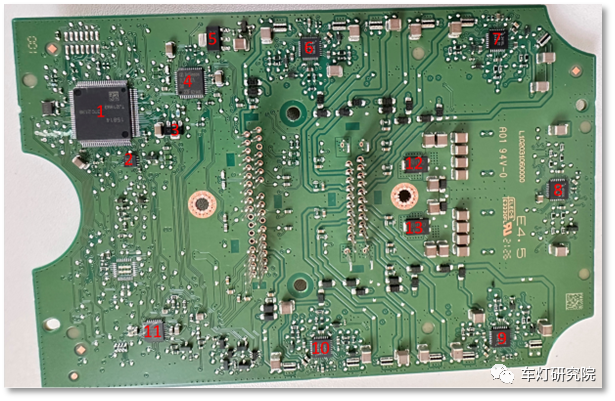
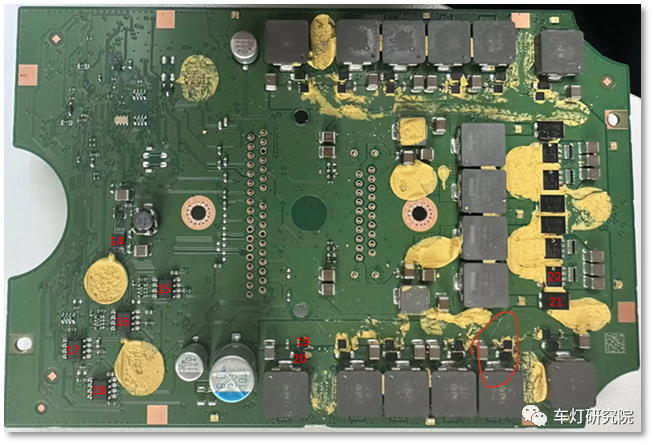
首先我们来看一下驱动板架构,驱动板形态如下,正面主要为芯片;背面主要为MOS管、功率二极管和电感等被动功率器件。
1.瑞萨(Renesas) 车规MCU: R7F7015814AFP. 用于控制可监测整个驱动板的运行。
2.安森美(Onsemi)车规CAN收发器: NCV7344. 作为MCU CAN信号的中继。
3.疑似LDO, 芯片丝印ACW14. 用于给MCU供电。
4英飞凌(Infineon)的SBC芯片: TLE9261. 通常作为MCU的主电源和CAN总线网络的接口。
5.疑似LDO, 芯片丝印SG2125.
6、7、9、10四颗芯片为恩智浦(NXP)的Buck controller: ASL3416. 该controller可输出3路恒流,驱动3路LED串。三路均需外置MOS和功率二极管。
8.恩智浦(NXP)的多相Boost controller. 该controller输出电压用于给Buck Controller供电。需外置4个功率MOS管和4个功率二极管。
11.安森美(Onsemi)的微步进电机驱动器NCV70514.用于调整远近光灯的位置。
12、13为通用功率二极管,丝印为8H10.
14.德州仪器(TI)的车规42V/1.5A Buck芯片: TPS57140-Q1
15、16、17、18四颗芯片为意法半导体的高端驱动器: VN7140AS.
19为功率MOS管,丝印为2A W16.
20为功率二极管,丝印为K8 t14. 板子背面电感旁边的都为和19, 20相同的MOS管和功率二极管。
21为通用功率二极管,丝印为8H10.
22为安世半导体的功率MOS管: BUK9Y38-100E. 耐压100V,导通电阻38mΩ
从芯片信息可以看出来,该ECU驱动板采用的是Boost + 4*Buck的两级电源架构,最终实现12路恒流输出。此种集中驱动的方法可以适用于不同的驱动需求,根据需求不同,可适当增减后级Buck芯片来调整输出通道数。
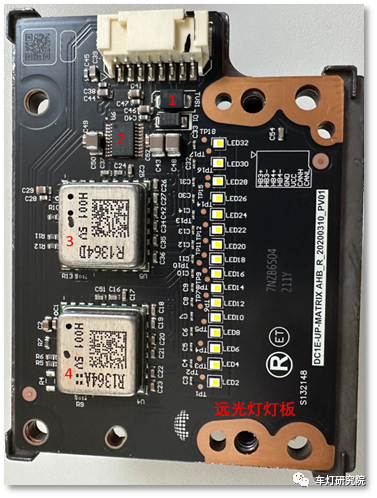
像素ADB远光灯灯板驱动相对复杂,所以在灯板上也存在一些芯片,各标号芯片信息如下:
1.二极管,丝印为MJNS CK.
2.德州仪器(TI)的LDO: TL720M05-Q1. 输出为5V/450mA, 用于给3和4中的矩阵管理芯片供电。
3和4 屏蔽罩之中的芯片相同。均为为德州仪器的矩阵管理芯片TPS92662A-Q1 + 丝印为A42/4 HV00RC Tn1401的疑似EEPROM芯片, 也可能为CAN芯片。EEPROM用于存储动态效果的程序。
该灯板上有16颗LED灯珠,因此极氪001的像素ADB远光灯总共由32颗LED灯珠组成。由驱动板右上角的接口标注可以看出,16颗LED灯珠由两组恒流输入驱动,平均每组恒流输入驱动8颗LED灯珠;另外可看到CANH和CANL, 用于和矩阵管理芯片TPS92662A-Q1通信。
近光椭球灯板上有3颗LED灯珠,无其他芯片。由右下角的接口标识,可知3颗LED由一个恒流输入驱动;且有NTC接口输出灯板温度信息。
辅助灯灯板上有两颗LED灯,由一组恒流输入驱动。
近光双椭球和远光双模组分别装在不同的支架上,通过联动支架来串联调光
近光的对焦方式比较新颖,先固定好kink模组,然后再通过调节flat椭球上的反光镜螺丝来对焦。
32像素ADB远光采用双模组设计,一个模组固定,另一个16像素模组需要进行预装配调节。
驱动采用当下主流的ECU驱动架构,为平台化设计,单平台可覆盖高、中、低配的驱动需求,只需适当增减二级Buck芯片即可。
驱动板芯片基本都为主流日系,欧美系大厂芯片。驱动板设计商未知。
远光灯为32像素ADB,分为两块灯板。近光灯由两块灯板,共6颗LED灯组成。灯板由华域视觉设计。
最后这款大灯来自于华域视觉。
点赞(
20
)
车灯供应链图谱(2025电子版)62家车灯供应商布局一览 I 盖世
LED车灯的构造与发光原理及优势
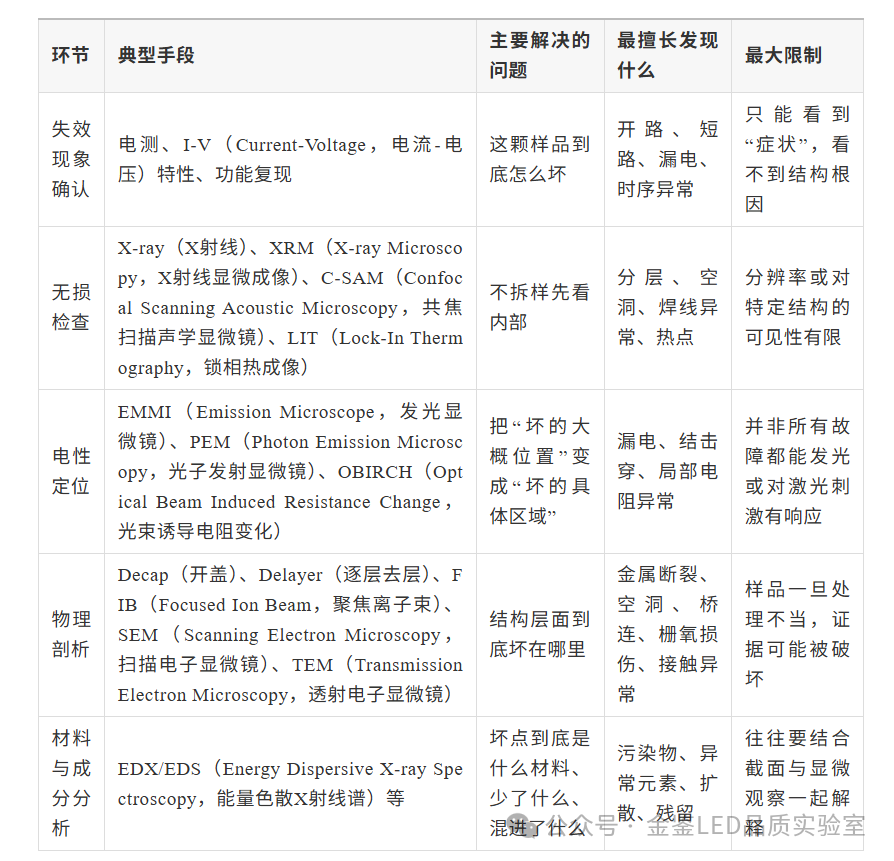
芯片越先进,越离不开失效分析:半导体失效分析是做什么的?
LM-80测试:评估LED灯具的寿命与性能
评论列表
共有
0
条评论
暂无评论
发表评论
取消回复
登录
注册新账号
微信小程序
微信扫一扫体验
立即
投稿
微信公众账号
微信扫一扫加关注
发表
评论

















发表评论 取消回复