【摘要】本文先分析电动汽车域控制器的发展背景及演变历程,然后基于一款纯电动汽车,对整车电子电气架构及动力域控制器进行设计,并设定其动力域控制器的性能目标,还为其设计一种硬件分时复用和软件模块化的动力域控制器方案,对原子服务功能、大数据驱动下的服务功能、信息安全功能进行定义。最后,通过台架性能试验、整车性能试验及整车可靠性试验结果,验证其动力域控制器的关键性能指标,希望为行业电动汽车域控制器设计提供参考。近年来,随着汽车加速电动化和智能化,汽车中的电子控制器单元(Electronic Control Unit,ECU)数量激增。据了解,从1993年到2010年,奥迪A8车型上使用的ECU数量从5个骤增至100余个,奥迪A8L装配的ECU数量在2013年也已超过100个[1]。而随着电动化快速普及和智能化迅速升级,通过增加ECU数量已非良策。由于不同ECU来自不同供应商,无论是整车功能的开发还是后期的维护升级,车企均需要和这些供应商分别沟通协作,过程繁琐,整车开发周期也因此拉长,人力物力成本随之增长[2]。此种背景下,传统分布式整车电子电气架构出现集中化演变趋势,原先相互孤立的ECU相互融合,分组集中控制,域控制器(Domain Control Unit,DCU)应运而生[3]。借由域控制器,可实现全车100余ECU到少数几个DCU的变化,控制功能迅速集中,有利于降成本[4];域控制器具备算力可扩展、更灵活的整车远程升级(Over-the-air Technology,OTA),使得汽车企业可以为用户实现不断迭代升级的功能体验[4];更为关键的是,域控制器打破了传统感知+算法+ECU的捆绑式开发模式,多种传感器的感知数据处理可以实现与控制器计算平台的数据融合,车辆能够及时作出更安全的决策[5]。前述的成本、安全或维护升级问题迎刃而解。因此,研究域控制器已成为各大主机企业和电控零部件企业的热门课题。目前行业对电动车的域控制器暂无统一的分类标准,但从目前来看,域控制器主要有两种分类方式。一种是按区域划分,具体可分为前区域控制器、左区域控制器、右区域控制器等,由于集中度较高、技术难度较大等原因,目前仅有特斯拉等少数企业采用这样的分类方式;此种分类方式对应的整车电子电气架构中,配置一个中央计算模块及3个域控制器,分别为前车身域控制器、左车身域控制器、右车身域控制器,如图1所示。
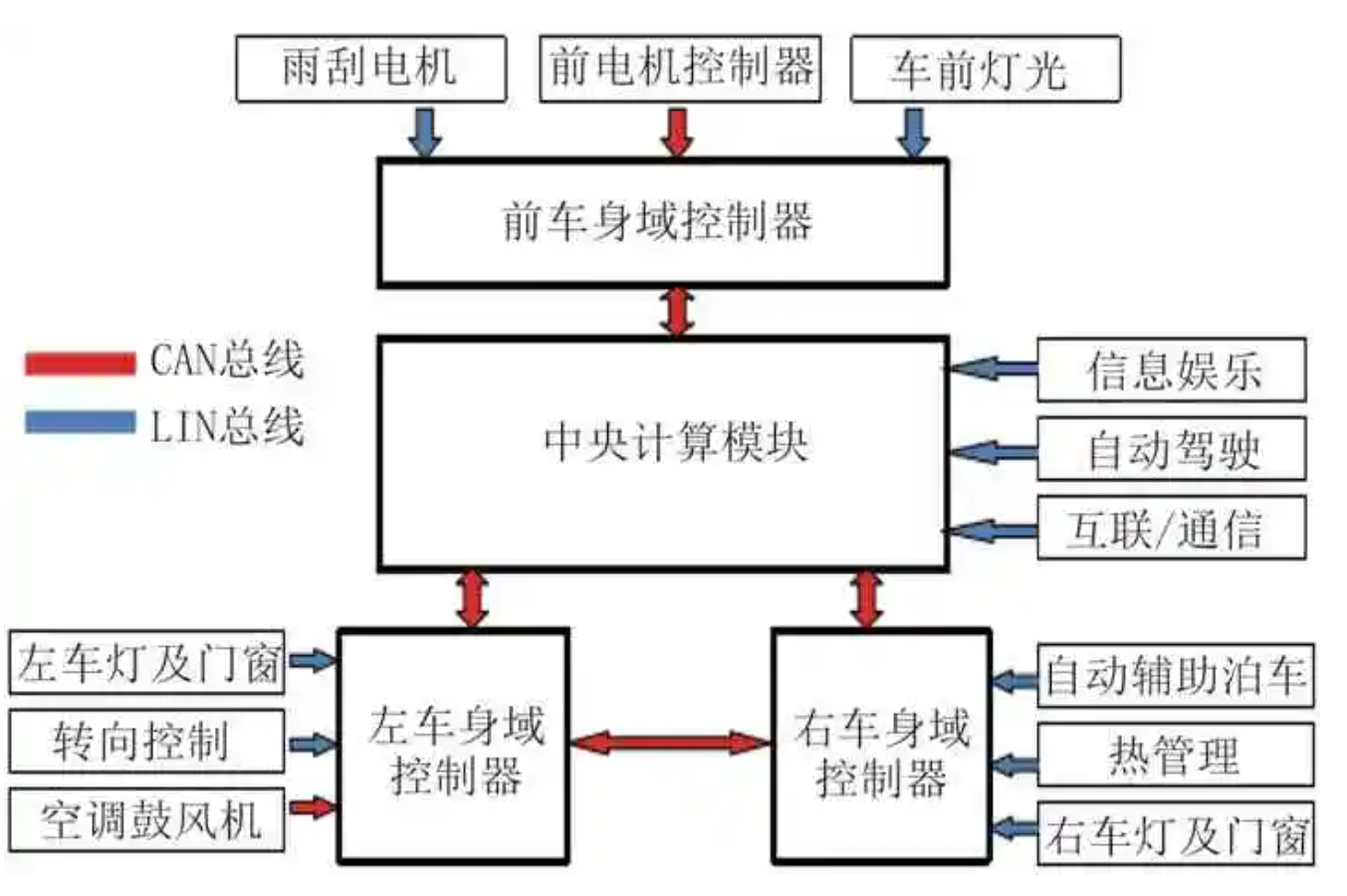
图1 按区域划分的域控制器示意图
相较于上述分类方式,按照功能划分的方式更为各主机企业接受。目前多数车企或是零部件企业都采用这一方式。从目前来看,主要分类有动力域控制器、底盘域控制器、车身域控制器、座舱域控制器、自动驾驶域控制器等,不同企业间略有差异。其中,动力域控制器,主要集成的是动力总成相关控制功能,主要负责动力总成的优化与控制。随着新能源汽车电驱和电控系统集成化发展,动力域控制器也越来越多地应用。按功能划分的域控制器示意如图2所示。
图2 按功能划分的域控制器示意图
本文研究的是一款纯电动汽车动力域控制器的设计,该域控制器的划分方式与前述按功能划分的方式相似,是一款动力域控制器。但功能与前述略有不同,该动力域控制器集成了动力域及部分底盘部件和车身部件的控制,在整车电子电气架构中扮演着核心控制作用。为表述和理解方便,下文一律称为“动力域控制器”。2.2 本文研究的电动汽车电子电气架构
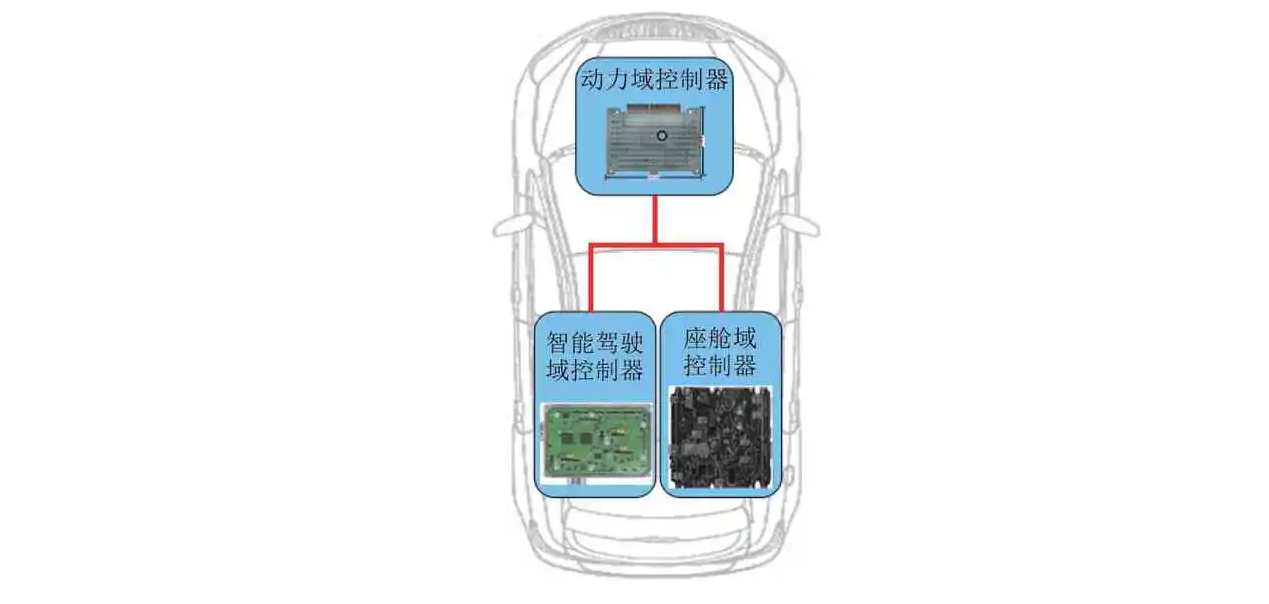
本文研究的电动汽车电子电气架构已由传统的分布式演变为当前的“三域”架构,如图3所示。
智能驾驶域控制器,基于环境感知、精准定位、控制与执行等项关键技术,实现车道保持、自适应巡航、自动泊车等项功能。座舱域控制器,应用异构操作系统,实现娱乐系统、驾驶员监控、车联网、OTA和音频处理功能集成。动力域控制器,是整车智能大脑,实现动力学控制、动力电池核心算法、充电控制、整车一体化热管理、车身控制和决策的逻辑和算法等。动力域控制器功能集成示意如图4所示。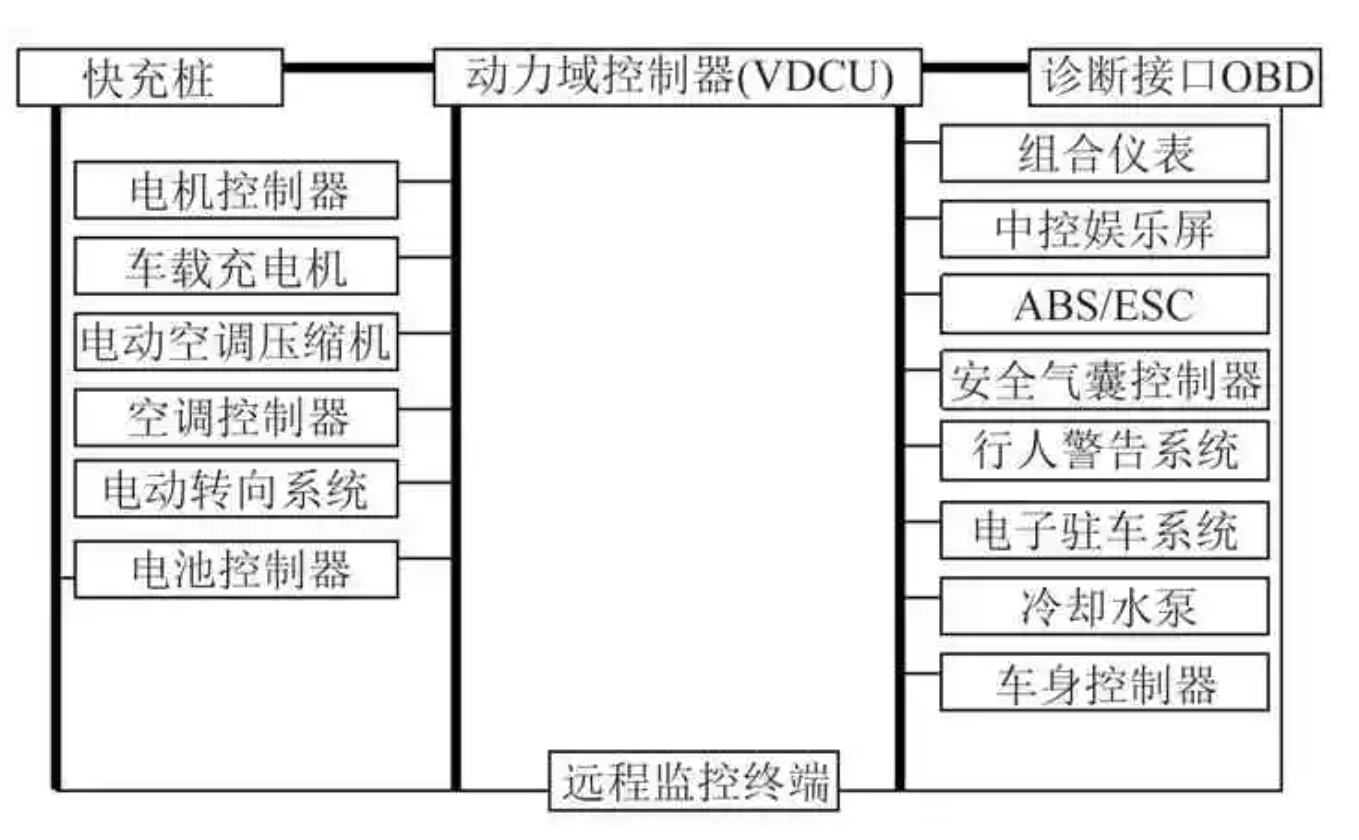
图4 动力域控制器功能集成示意图
3 动力域控制器设计
3.1 性能目标
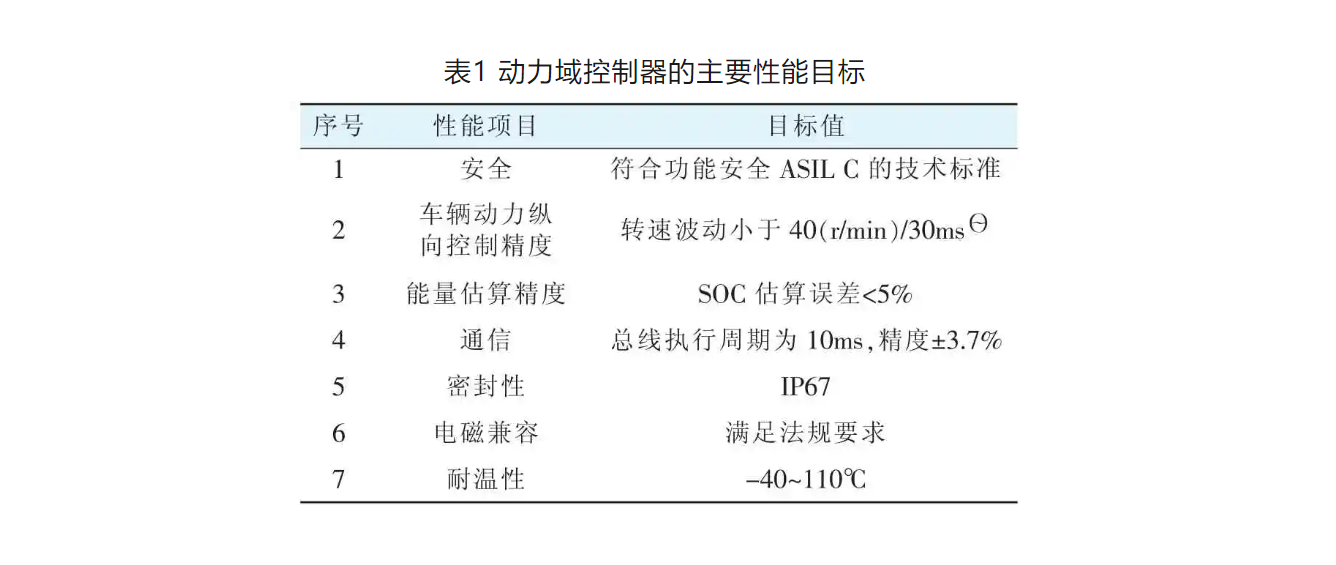
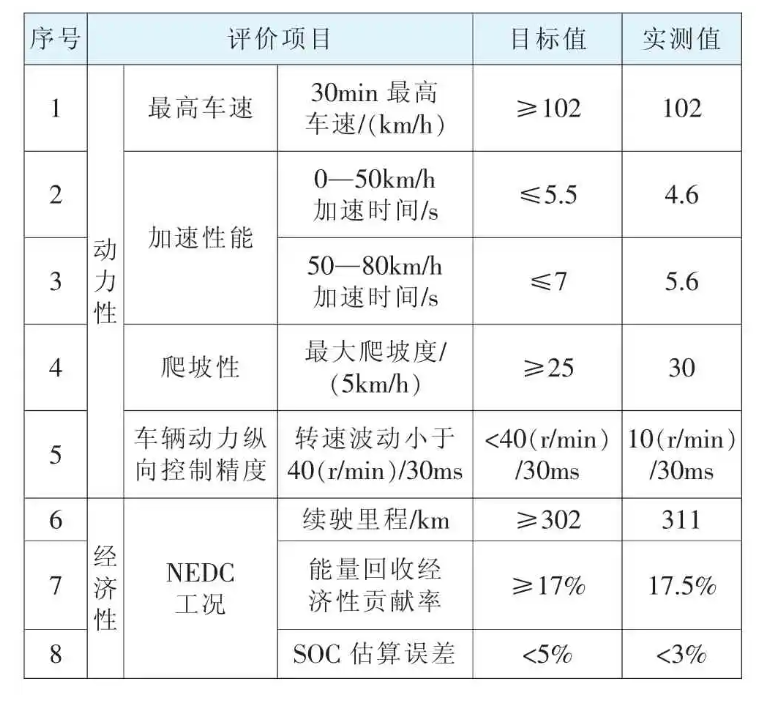
目前主要以博世、德尔福、大陆为代表的国外技术公司长期垄断动力系统的控制器产品,开发具有自主知识产权、功能性能与国际一流产品相当的动力域控制器,化解电动汽车域控制技术“卡脖子”迫在眉睫。本文研究的电动车动力域控制器,主要性能目标见表1。
3.2 分时复用的硬件
应用分时复用技术,设计动力域控制器的硬件,实现集成整车控制器、空调控制器、中央网关、真空泵控制器、水泵控制器,微处理芯片、电源芯片、存储芯片分别由原来的5个减少为1个,通信芯片由原来的8个减少为4个。在控制器硬件的安全性能、控制精度、采样精度和响应水平均提高的情况下,成本下降30%。未集成的5个控制器如图5所示,集成后的动力域控制器如图6所示。
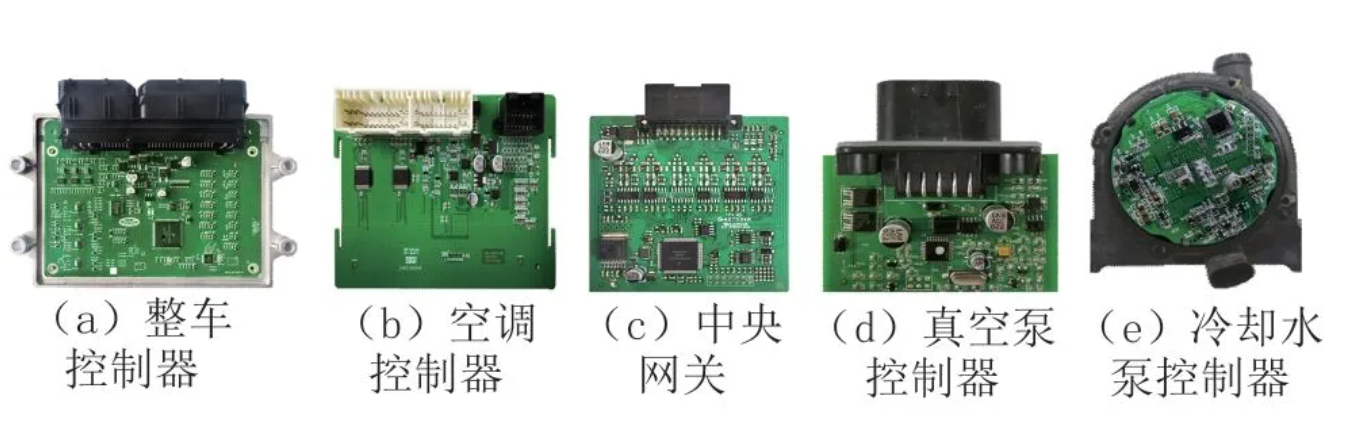
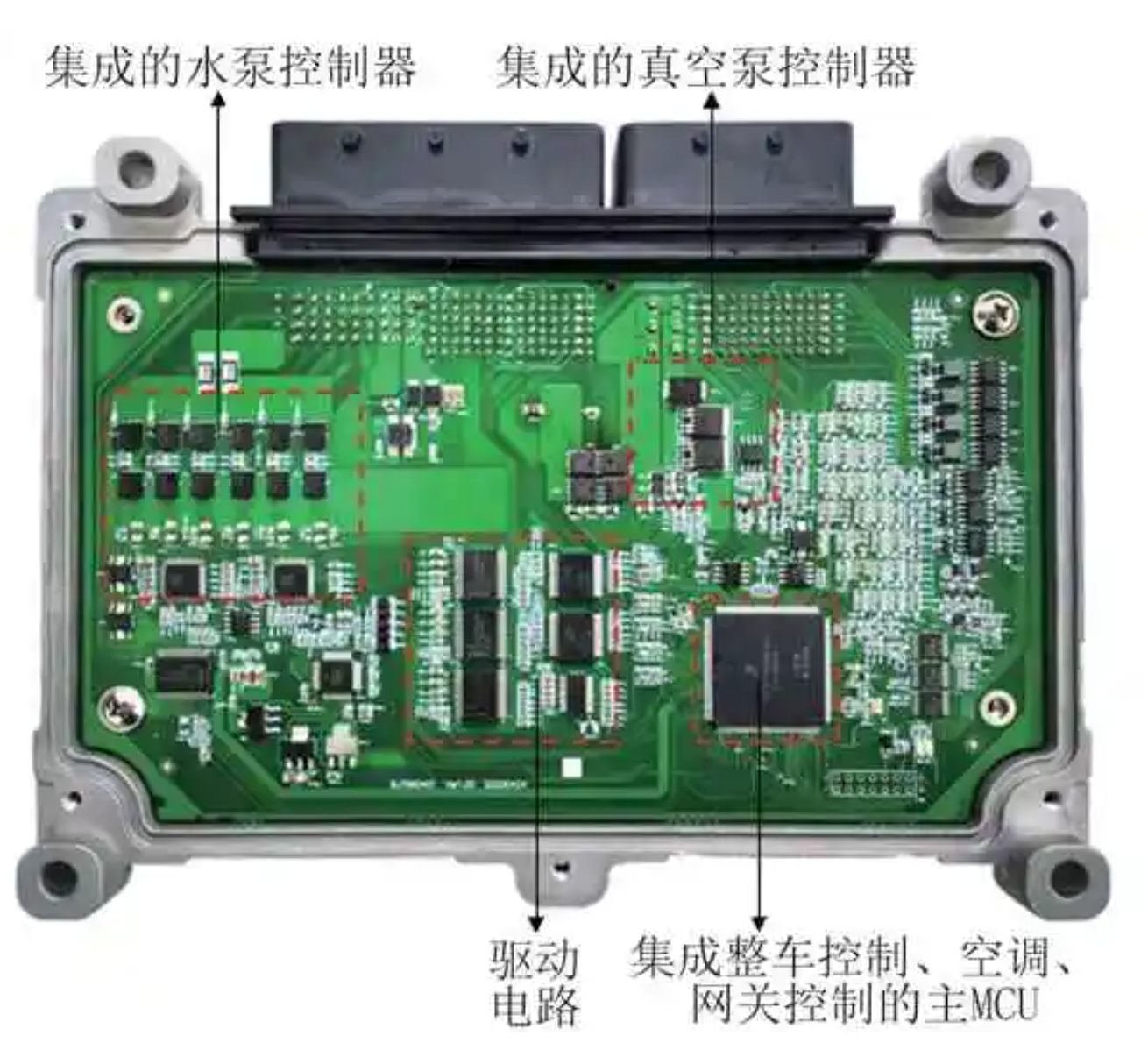
图6 分时复用的动力域控制器硬件示意图
3.3 模块化的应用层软件
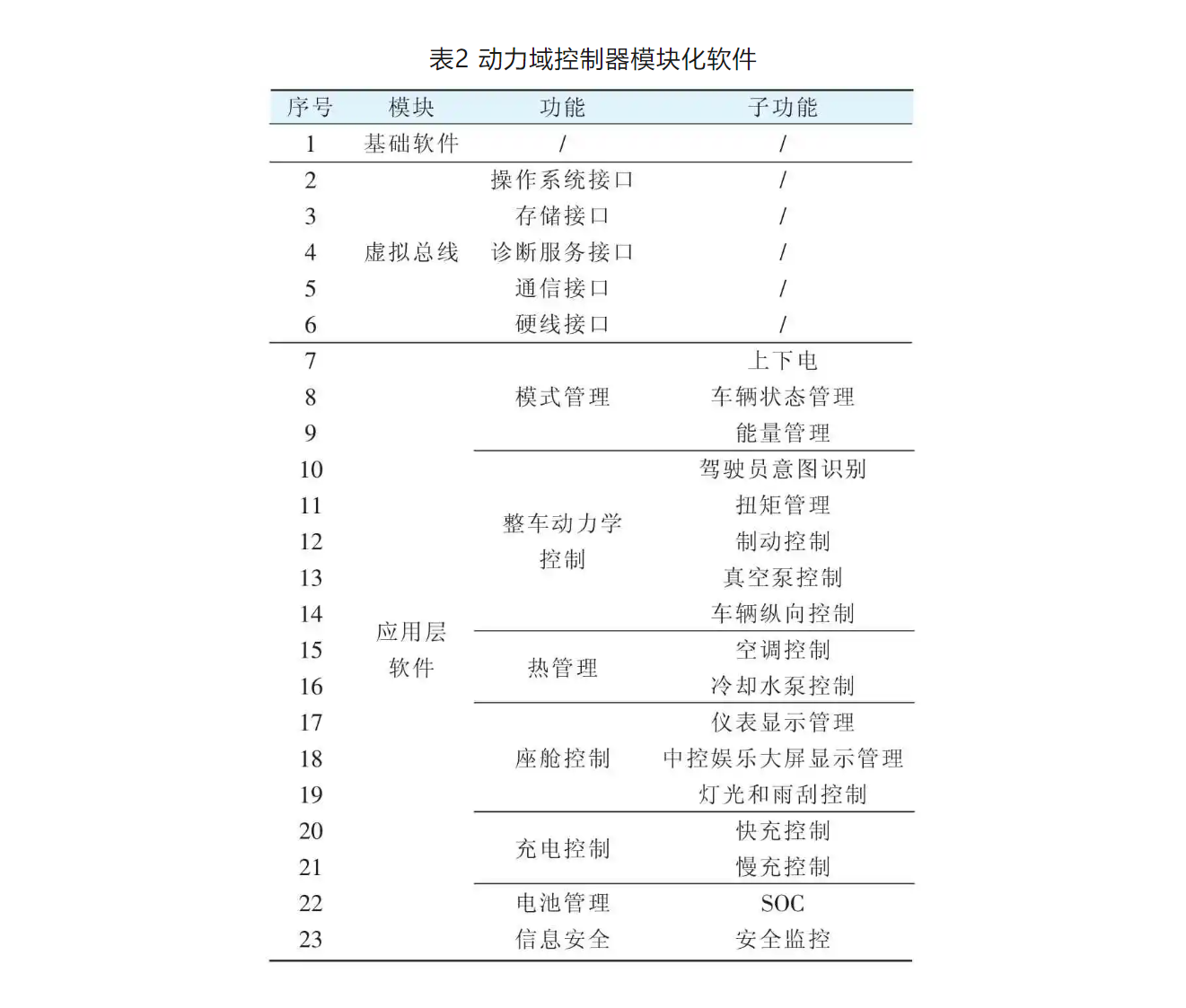
应用Autosar软件架构,开发虚拟总线软件模块,软件和硬件解耦、应用层软件解耦,实现软件模块可重用、易移植。应用层软件有模式管理、整车动力学控制、热管理、智能座舱交互等7个功能模块、17个子功能。具体见表2。
3.4 核心功能定义
3.4.1 原子服务功能
在应用层软件的模块化、标准化基础上,进一步识别出不可再分的最小控制单元,建立标准的软件库函数和API接口,开发可供不同软件应用调用的原子服务功能。动力域控制器的应用层软件根据功能的时序及其功能特性,调用相关的原子服务,开展基于逻辑的组合和排序,实现面向服务的敏捷开发。
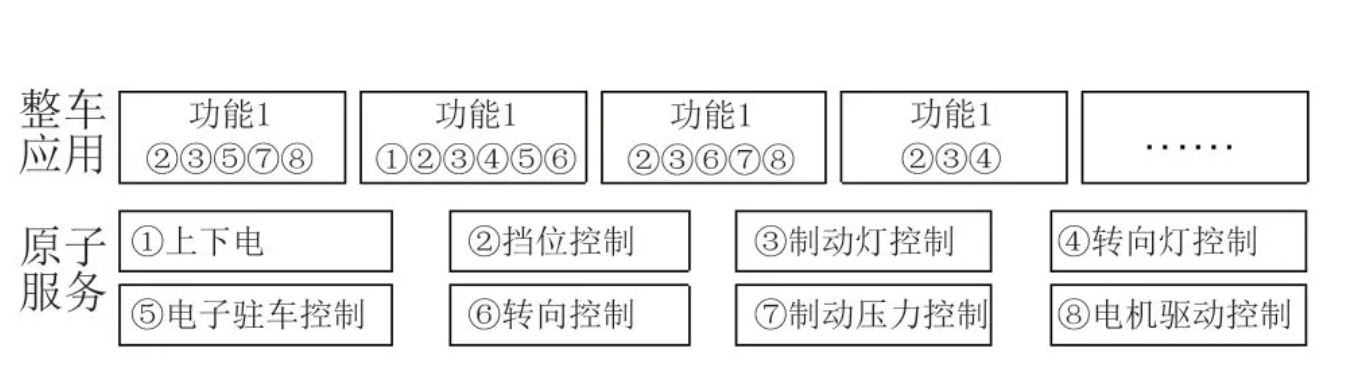
本文研究的动力域控制器,开发了8项原子服务功能,包括上下电控制、挡位控制、制动灯控制、转向灯控制、电子驻车控制、转向控制、制动压力控制、电机驱动控制。8个原子服务可以任意分组或任意数量的组合,形成新的整车控制应用软件,如图7所示。
图7 原子服务功能示意图
大数据驱动下的服务建立在由车端的动力域控制器、车载远程监控终端TBOX和车外的远程监控云平台三层架构之上。电动汽车均连接在远程监控云平台上,在使用过程中,云平台实时采集整车数据,应用边缘计算技术开展用户驾驶行为分析,并将结果反馈给动力域控制器。基于云端到车端的数字化协调控制,实现千人千面的服务,如图8所示。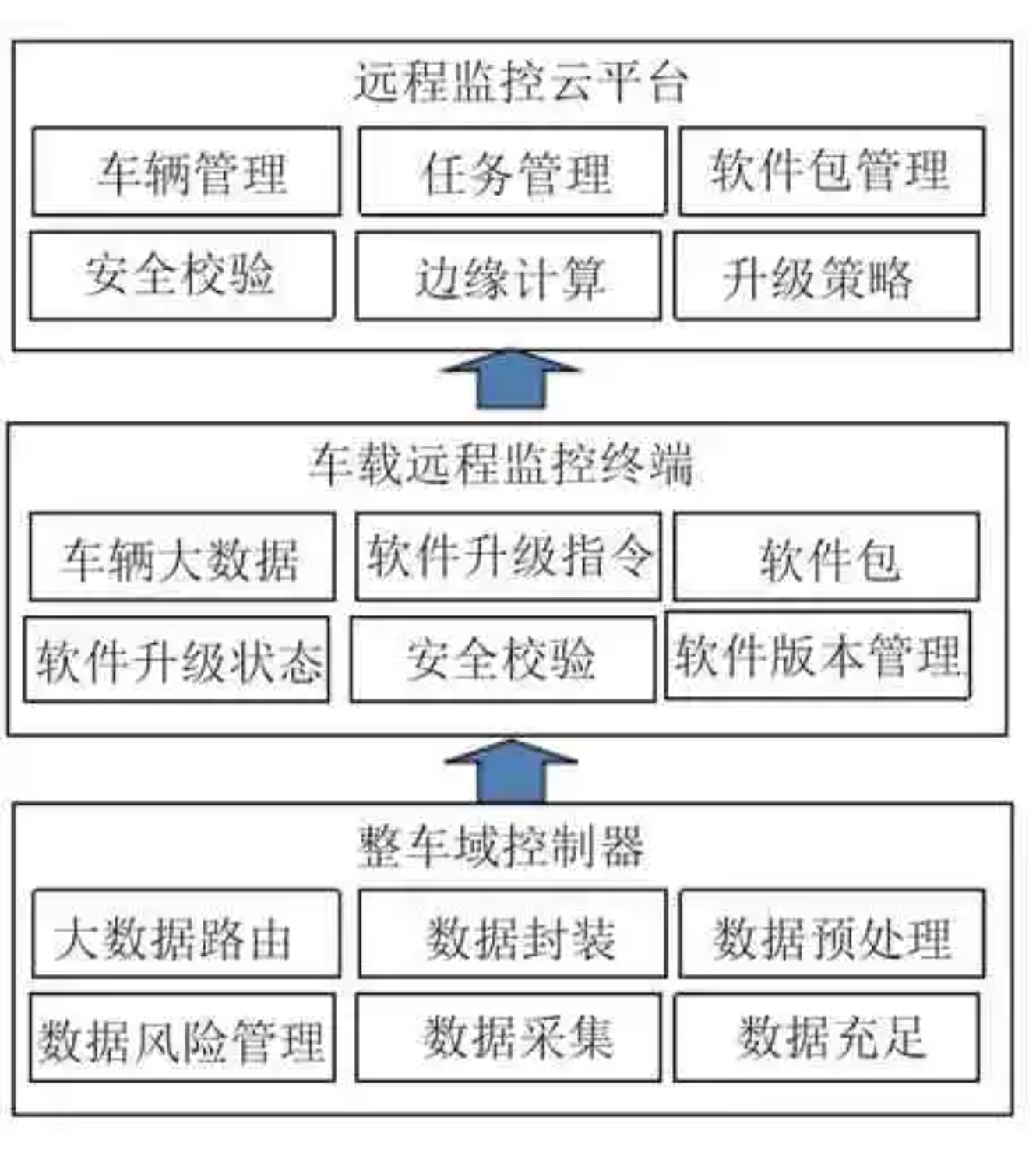
图8 大数据驱动的服务功能示意图
因电动汽车均与远程监控云平台连接,本文设计的动力域控制器从车端和云端两个维度确保整车信息安全,防止车辆被攻击。1)车端,3个方面。①协议安全,针对关键信号,应用身份认证和信号有效性识别技术,杜绝外接设备发出非法信号造成的干扰;②交互安全,针对跨域的信息交互,基于时间敏感管理完成信号合法性检查,应用加密算法完成信号正确性检查;③网络安全,应用安全网关过滤非法ID,降低网络泛洪攻击造成的网络瘫痪风险。2)云 端,3个 方 面。①访 问 安 全,应 用GRE隧 道 和VPN专线技术,保证云端数据与公网物理隔离,降低网络数据拦截风险;②通信安全,私有化安全交互协议,应用时间戳、底层心跳包,有效抵御中间攻击和回滚攻击;③链路安全,车端和云端的交互数据应用非对称秘钥体系加密,保证业务安全。4.1 硬件台架试验验证
根据法规及多年实践积累的试验项目,设计了硬件台架试验验证方案,共实施试验9类86项,试验全部验证了动力域控制器的硬件设计可行。其中,最重要的试验项目有5类15项,见表3。
4.2 整车性能试验验证
使用本款动力域控制器的整车,为达成整车经济性、动力性目标,重点针对全加速踏板起步工况、模式转换工况、驻坡工况开展驾驶性攻关,达到主观驾驶平顺无抖动。整车功能性能试验结果见表4。
4.3 整车可靠性试验验证
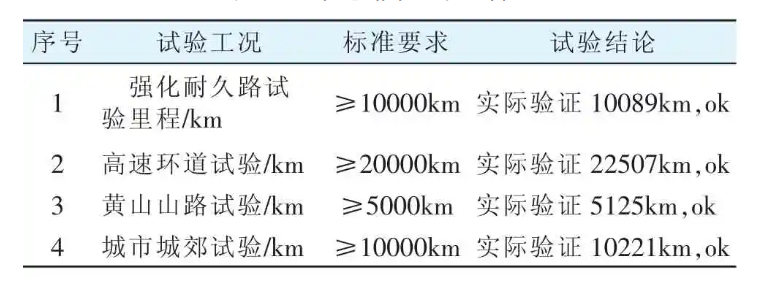
使用该动力域控制器的整车,开展整车可靠性试验,试验道路及里程分布见表5,试验历时6个月,折合实际使用里程约30万km,过程中动力域控制器表现出安全、可靠的特性。整车可靠性试验结论见表5。
5 总结
本文基于一款纯电动汽车设计了整车电子电气架构及动力域控制器,设定了动力域控制器的性能目标,设计了一种硬件分时复用和软件模块化的动力域控制器方案,定义了原子服务功能、大数据驱动下的服务功能、信息安全功能,通过台架性能试验、整车性能试验及整车可靠性试验结果,验证了动力域控制器的关键性能指标,供纯电动汽车域控制器设计开发参考。
参考文献:
[1]吴成东.传统汽车应用域控制器与主干网技术路线探索[J].汽车电器,2021(3):43-45.
[2]郭炎菊,查云飞,陈文强,等.智能汽车电子电气架构综述[J].汽车文摘,2021(8):19-24.
[3]高丽,杨依楠.纯电动汽车整车控制器技术及发展[J].汽车实用技术,2021(6):20-22.
[4]黎伟,喻晓勇,匡小军.浅析汽车电子架构发展与典型域控制器[J].时代汽车,2021(16):163-164.
[5]刘佳熙,丁锋.面向未来汽车电子电气架构的域控制器平台[J].中国集成电路,2019(9):82-87.
文章转自 微信公众号 智能汽车设计




发表评论 取消回复