随着汽车自动驾驶、电动化、网联化的发展,汽车上的各种传感器需求也越来越多,从最早的超声波雷达,到现在的毫米波雷达,激光雷达;从以前的倒车影像摄像头,到做自动驾驶辅助用的高分辨率摄像头;从以前的传感器主要集中在车辆前后部,到现在遍布整个汽车周围,可以说,未来的汽车,本身就会是一个行走的大传感器。最好的例证如2021上海车展期间,华为和ARCFOX极狐发布的联名款新车—极狐阿尔法S 华为HI版,该车就搭载有3颗96线车规级激光雷达,6个毫米波雷达,12个摄像头,13个超声波雷达,同时拥有算力可达400Tops的华为自研芯片,据称可达到L3/L4阶自动驾驶水平。试驾的视频刷屏全网。视频中,车内驾驶员对车辆进行完全脱手脱脚的情况下,进行了自动驾驶测试。即便是在两侧停满各种车辆的拥挤道路上,车辆能自动预留出足够通过的空间,躲避对象来车及非机动车和人物等,宛如一个娴熟的司机。因此可以看出,随着自动驾驶的不断发展,需要车辆能够即时自动检测其外部环境,因此对不同类型传感器的需求越来越多。起初,这些传感器是为某些特定功能而设计的,分布于车身四周并独立工作。但随着传感器越来越多,传感器之间的相互集成或者传感器和车灯之间的集成将非常有意义。光线雨水传感器:用传感器发出的红外光来分析挡风玻璃的能见度和水滴的影响。UPA(辅助泊车超声波传感器):近程超声波传感器通过发射超声波并分析通过障碍物反射的信号,从而检测车辆前后与障碍物之间的距离,并将数据传输至处理器进行计算处理,在显示器上显示相应的图像或数据,或者由报警器发出警报。它们用于辅助泊车系统已经超过10年,是自动泊车功能的基础之一。根据车辆的等级,您可以在一辆车周围找到多达16个超声波传感器,它们通常位于保险杠或挡泥板上。

可视摄像头:根据不同功能要求可以使用不同类型的摄像头;比如近景摄像头用于辅助泊车,而远景摄像头则用于车道检测或行人检测、限速识别、自动远光甚至ADB远光灯。根据其功能不同,可视摄像头通常装在前后保险杠上、自动门把手后或前格栅附近,以进行短距离摄像。如果需要远程摄像,则前挡风玻璃后面是最佳位置,因为可以用雨刮来清洗它们,而且由于安装高度的原因,它的远景范围也会更好。毫米波雷达:目前主要用于盲点探测,有时也用于自动巡航控制,根据不同的解决方案,它们的工作频率从20到100千兆赫,盲点的范围通常为30米,自适应巡航控制ACC为200米。盲点的当前安装位置一般在翼子板上,允许适当的可视角度。激光雷达“光探测和测距”:是一种主动式远程传感器,它用对人眼安全的脉冲红外激光照射目标,用传感器测量反射脉冲,扫描距离、速度、角度和物体宽度。激光雷达测绘和精确检测可与其他传感器集成,能够对车辆周围的环境进行分析和预测,用于自动驾驶或主动安全系统,如自适应巡航(ACC)、自动紧急制动(AEB)、防抱死制动系统(ABS)等。激光雷达也有两种类型:机械旋转式扫描激光雷达和无任何运动部件的固态激光雷达(SSL)。两者的性能有所不同,由于机械扫描激光雷达通常会扫描200米以内,150°的水平视角范围(FoV),而固态激光雷达SSL的检测距离更短,水平视角范围只有机械扫描激光雷达FOV的一半。当然我们还可以添加其他类型传感器,虽然这些传感器还未实际车载使用,例如基于红外光束的短距离探测器。从光学角度看,这些传感器和激光雷达类似,只是使用不同的波长。我们还可以考虑未来车间通信(C2C)的可见光雷达,其光学性能和摄像头相似。如今,大多数传感器在车上都是可见的。当然一方面,现在的车厂也希望用这些传感器,来给用户传达一种高端智能的感觉。但是随着辅助泊车系统的普及,前视摄像头的市场份额正在急剧增加,激光雷达也开始逐步量产。在不久的将来,传感器将变得越来越平常,因此不一定需要安装在车身可见处。相反,将它们集成到车灯系统中,成为造型的一部分将非常有意义。可以把它们装在单独的透镜模组中,甚至隐藏在前灯饰圈后将会很酷。由于车灯中使用的材料大多是热塑性材料,雷达作为一种不可见光传感器,在车灯设计中,是很容易地集成的。例如下图马瑞利展示的车灯集成展示样件。此外,当传感器、激光雷达或摄像头安装在远近光支架上时,其探测范围会随着车身姿态角一起变动。从而在加载或加速/制动情况下还能保持其性能。这是集成远程传感器的一个巨大优势。同时通过适当的集成方案,甚至可以选择装或者不装传感器,以区别车辆的不同配置,而且无需对车辆外观进行任何更改,例如自动泊车或自适应巡航ACC,从而简化了车厂的工作,因为大多数车型都会有好几个配置的车灯版本,这种选择方式正好适合多配置方案的车辆。而如果车厂考虑在前格栅或自动门把手中集成摄像头,则需要带或不带摄像头的两个版本的产品,从而增加了复杂性。同样,如果在生命周期内有版本变动,则仅需对车灯进行小改型,而不会对车辆的其他车身零部件进行额外的改动。在目前的整车架构中,车灯和传感器是分别安装的,因此都必须进行独立的密封设计,使其防水、耐高压清洗和其他化学药品,同时要有通风系统使热量和水汽能够散发出去。如果我们把车灯和传感器集成在一个壳体内,就可以减少设计、加工和制造壳体的数量。从这个角度来看,在车灯内集成传感器将显著的节省成本。在车灯和传感器面临的各种技术问题中,由于电气连接不良或松动而导致的电气故障是最严重的问题,这会直接带来行车安全问题。因此工程师总会千方百计的减少产品中的连接器数量。显然,集成正是迎合这个趋势,当然设计师也应避免使用过于复杂的连接器。车灯集成传感器之后,由于车灯和传感器共用一个连接器,因此减化了车厂装配线上的操作。更加有利的是,因为只有一个壳体安装在车身上,减少了打螺钉的次数,以及每次安装调整车灯和传感器的时间。传感器性能
传感器集成到车灯里,相当于在传感器前面多加了一个车灯的透明面罩,而透明面罩会降低传感器的性能。一般车灯PC透镜的穿透率为90%,摄像机的性能也会同比例的降低;而对于激光雷达系统,它取决于被探测物体的反射率。对于一般的行人来说,反射率为6.3%左右,反射信号的衰减可以忽略不计。此外,车灯透明面罩的形状也可根据传感器不同而进行设计优化,以避免来回光束的变形或扭曲。同时,由于目前几乎所有的传感器外面已经有了一个保护的玻璃透镜,而这个玻璃透镜同样会吸收10%的光,如果集成在车灯内,则可以去掉这个保护玻璃透镜,将大大减少光传输的影响。当然传感器有可能受到其它车灯光学模块发出的光的影响。因此必须进行全局光学优化,考虑不同元器件的特性,比如光学模组、挡板、外面罩、传感器等等。安装空间
现如今的车灯造型越来越扁平化,车灯的开口尺寸越来越小。市面上已经有了非常薄的薄透镜模块,当前开发的远近光模组尺寸已降至15 mm甚至以下。尾灯也同样如此,各种类型的光导大量使用,使不同的尾灯功能可以交织在一起。乍一看,可能会认为减少了传感器的安装空间。当然这种结论也没有错,但是我们同时也要看到,由于车灯的扁平化,车灯周围的空间会相应的增多,而且光学模组和驱动器的体积也将持续的变小,从而为传感器腾出空间。同时,正在开发的微型化固态激光雷达也为集成提供了另外一个解决方案。热效应
由于传感器也有功耗,会在车灯内增加散热,可能会降低其性能,或提前使远近光模组降级。摄像头的功耗一般为3瓦,机械激光雷达为7-15瓦,固态激光雷达为2-4瓦。因此,机械激光雷达的影响最大,可以占到车灯总功率的30%,并显著提高车灯内的温度,相对来说,摄像头和固态激光雷达的影响将很小。温度升高对车灯系统的不同零部件和传感器都有影响,比如远近光模组、PCB板、驱动、电机等。如果不进行设计优化,也不进行系统保护,则前大灯内的温度可能会更高,有降低传感器性能甚至超过其极限工作温度的风险。因此必须从一开始就把车灯当成一个完整的系统来设计,而不仅仅是对零部件进行单独设计,传感器和车灯的设计团队之间需要紧密合作,因为传感器也是一个热源,需要集成进行散热冷凝的仿真模拟。电磁干扰效应
由于热效应的影响,电磁干扰增加的风险有2种,从传感器到车灯零部件或者从车灯零部件到传感器。因此在项目的早期阶段必须进行紧密合作,以分析所有约束条件,优化电路布局,同时增加电磁干扰屏障,以使车灯设计更加符合造型风格。售后维修
还有一个更加重要的问题需要考虑,即发生交通事故时车灯更换的复杂性和成本。当然大家都不希望增加更换车灯时的成本,可以提前设想的一个解决方案是,设计一个打开灯壳后盖取出传感器或者在车灯内设置一个“可维修区域”,当然这种方案会使更换变得复杂,而且每次都需要对传感器进行调整和校准。在前面的所有考虑因素之外,还有一个非常重要的因素是电子系统架构。如今,车灯已不仅仅是一个零件,而是嵌入了大量的电子元器件,是整车复杂电子系统的一部分,同时接收来自不同系统的信息。这种情况随着智能车灯的普及会越来越多,比如数字前大灯和显示屏后尾灯。如果再将传感器集成在车灯内,将使车灯在某些情况下成为一个独立的自主智能系统,给驾驶员提供更多智能的支持。而且由于所有部件从一开始就集成设计,在一个大灯系统内,使用共同的电子架构,因此电子系统可靠性更高,成本更低,对整个车身电子系统也有好处。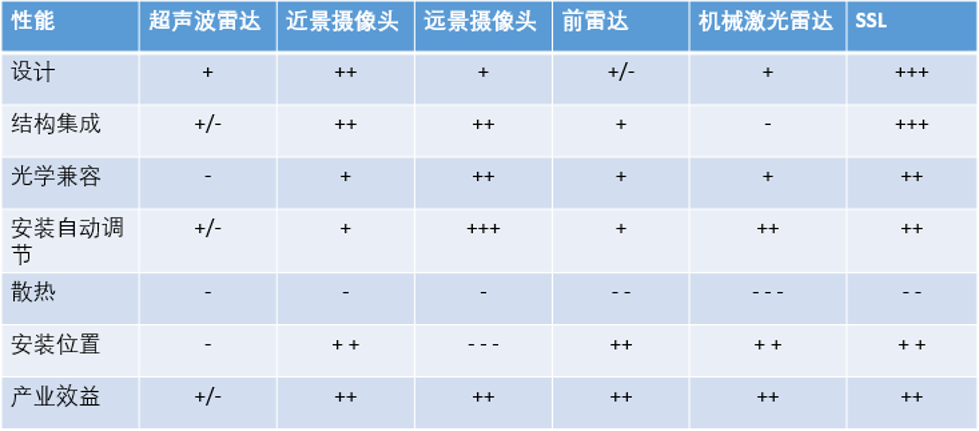
现在我们把所有传感器的内容归纳一下,总结在上面的表中,来对比分析各种传感器集成的优缺点。总的说来,最方便集成的是固态激光雷达SSL,集成后大多数的雷达性能都能得到提升。近景摄像头集成也大有好处,当然取决于所需的水平视角。而对于像机械激光雷达系统来说,集成对散热的挑战较大,但并非不可实现。而对于远景摄像头和UPA,集成在车灯内的意义不大。车灯集成传感器是自动驾驶趋势的一种必然结果,各家灯厂相关研究都在紧锣密鼓的进行中,相信很快就能看到实车上市。



发表评论 取消回复