简介:驾驶员在道路交通中利用视觉来识别和处理重要信息和危险情况。为了保证可靠和准确的视觉系统性能,在白天和夜间驾驶期间都需要充足的道路照明。Erkan等人的研究确定了与速度相关的最小道路亮度,该亮度使驾驶员在夜间行驶时有足够的安全感。
-道路亮度与安全感知-
视觉系统是驾驶员在道路交通中的主要信息获取系统[2],负责在早期阶段识别和处理重要信息和危险。为了保证可靠和准确的视觉系统性能,在白天和夜间驾驶期间都需要充足的道路照明。各种研究表明,道路亮度的增加会导致夜间事故的显著减少[3]。此外,驾驶员的主观安全感也受到积极影响[4]。因此,道路亮度的变化对夜间交通中驾驶机动车的安全性产生了重大影响。研究表明,城市环境感知亮度的增加通常会提升人们的安全感和舒适感[5]。在城市地区,这种亮度的增加可以通过改善街道照明系统来实现。但是在乡村道路和高速公路上,通常没有安装固定照明设备。道路仅由车辆前照灯照明,因此,前照灯的设计必须能够提供足够的道路照明。Erkan等人通过进行综合建模,将行驶速度作为一个潜在的影响因素,确定道路上需要哪种最低亮度才能使驾驶员感到足够明亮,以促进驾驶员安全感的提升,从而改善驾驶体验和舒适度。
-研究问题-
对于夜间驾驶,增加道路亮度和改善亮度感知有利于提高安全性和驾驶舒适性。本研究通过考虑真实夜间驾驶场景中驾驶速度对亮度感知的影响,制定了以下三个研究问题:
(1)车辆前方不同区域亮度感知的相关性评估;
(2)分析不同区域亮度感知与行驶速度的关系;
(3)确定足够的安全感亮度阈值,以保障夜间驾驶的安全。

-研究设计-
为了能够调整车辆前方的亮度水平,对标准的商用LED前照灯系统进行了改进,使其能够通过电脑控制脉宽调制(PWM)值和前照灯近光分布的强度。对于每种道路照明设置,受试者根据其对亮度的感知和安全感进行评估。共有23名受试者(5名女性,18名男性)参加了实验,年龄在22至37岁之间。
1. 静态试验
在静态试验中,每位受试者坐在驾驶员座椅上在不同PWM值下评价车辆前方道路的亮度。共随机测试了12种不同的亮度级别。对于受试者的亮度感知采用语义和五步双极评分量表结合的方式进行评估,值为“1”表示“非常暗”,值为“5”表示“非常亮”。在给出最终评分之前,针对每个测试场景,进一步询问受试者是否敢于在给定的道路亮度下驾驶车辆。
在完成静态测试条件后,要求受试者指出车辆前方不同区域与亮度评估的相关性。以车头为起点,测试车辆所在车道被划分为三个不同的区域:第一个区域即近场,为0 m到20 m;第二个区域即中场,为20 m到32 m,第三个区域即远场,从32 m延伸至道路消失点,见图1[6,7]。
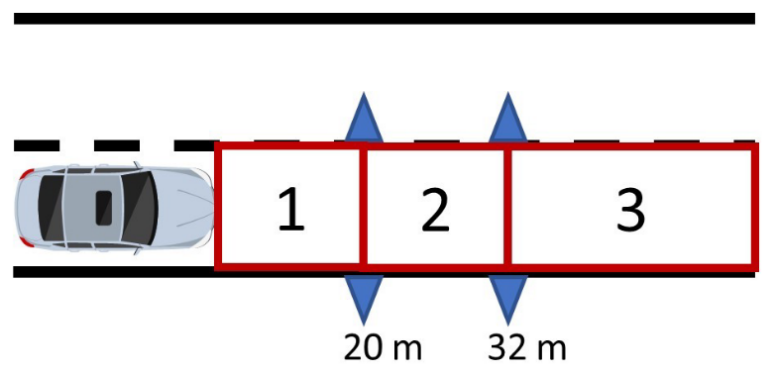
图1 测试车辆前方区域划分
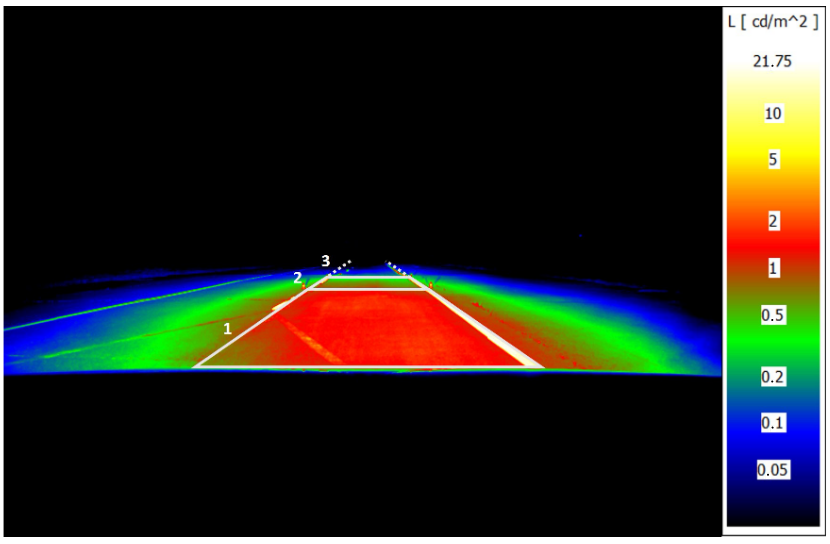
为了直观的获得车辆前场空间亮度分布,使用成像亮度计测量在前照灯最大亮度(PWM值为255)时车辆前方区域的空间亮度分布,如图2中显示了所划分的区域能够较好的对应三个不同的亮度区域。
图2 测试车辆前方的空间亮度分布
2. 动态试验
在动态测试条件下,受试者以恒定速度(定速巡航控制)沿着由两条车道组成的800米长的直线测试跑道行驶,每条车道的宽度为3.50米,重复30 km/h和60km/h的实验。与静态情况相比,在最初的12种亮度设置中选择了6种亮度。对于每个速度级别,随机呈现不同亮度级别进行评估。每次测试后,受试者评价了对每组行驶速度和亮度的安全感知。
-研究结果-
1. 车辆前方亮度及其在不同评价区域间的相关性
图3显示了三个不同区域(参见图1和图2)的平均道路亮度和标准差,这三个区域的平均亮度值与驱动LED前照灯所用PWM值对应。对于评估区域和PWM值的每个组合,可以提取相应的平均道路亮度用于进一步分析。
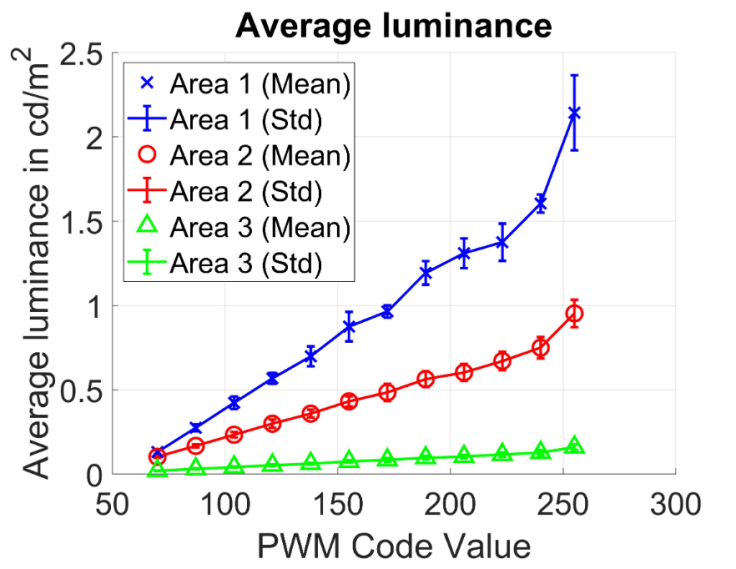
图3 平均亮度值和标准差
采用线性回归确定不同评估区域之间的平均亮度相关性。从图4可以看出,近场的平均亮度与中场和远场的平均亮度之间存在显著的线性关系,r=0.999,p<0.001,R2=0.998;r=0.998,p<0.001,R2=0.996。
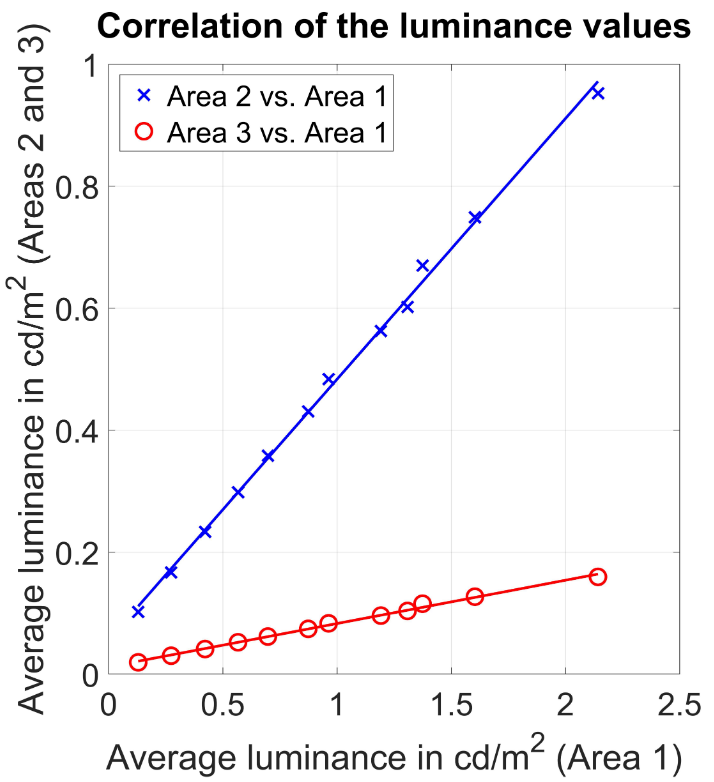
图4 与近场平均亮度相关的中场和远场区域的平均亮度值
在静态条件下(0 km/h),对不同车辆前场区域的相关性进行评估,以评估受试者的亮度感知。如图5所示,相应的方框图显示了受试者在三个不同评估领域的中位数和分位数。
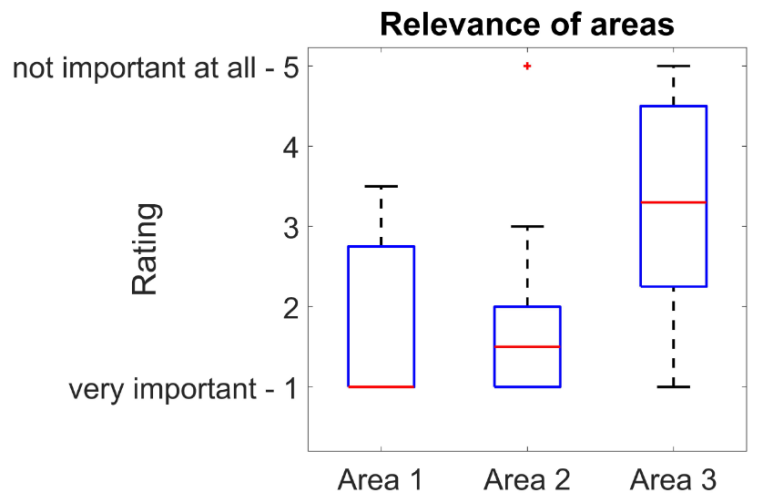
图5车辆前方三个不同评估区域评分
Friedman检验显示,受试者的评分在各个评估领域之间存在显著差异。远场的评分与其他两个评估领域之间有显著差异(p<0.001,z=−3.34;p<0.001,z=−3.86)。然而,近场和中场评分之间没有显著差异。因此,可以得出结论,就受试者的亮度感知而言,车辆前方的近场和中场同等重要,而远场与其评估不太相关。因此,对于夜间驾驶时的亮度感知应将近场和中场结合,将其视为一个单独的评估区域。
2. 与车速相关的车辆前方亮度评估
为了确定受试者的感知亮度与近场和中场评估区域的平均道路亮度之间是否存在显著相关性,采用对数函数对所采集的数据进行拟合,如图6所示。
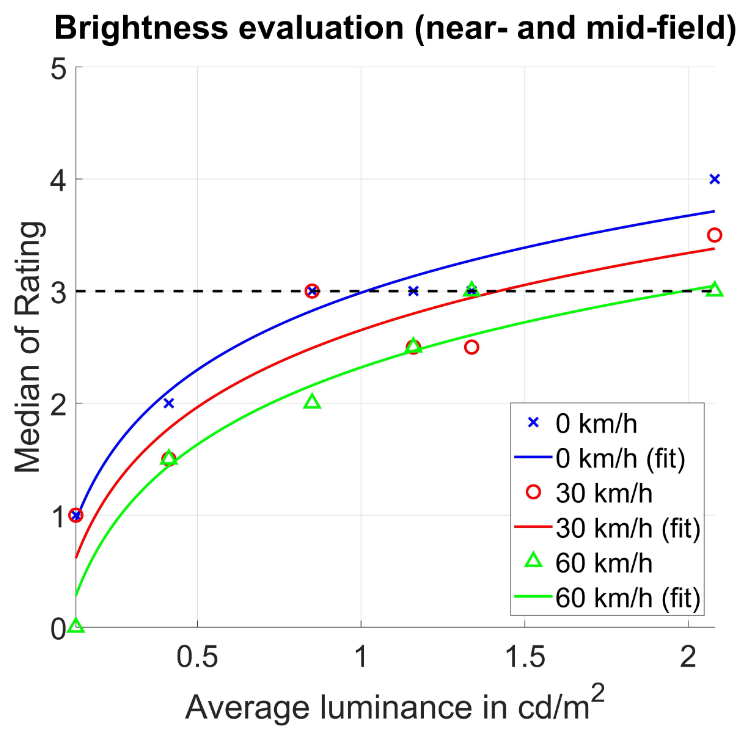
图6 不同行驶速度下近场和中场的亮度评估与平均路面亮度关系
随着道路亮度的增加,亮度等级呈对数增长;随着速度的增加,相同的道路亮度值会变得更暗。虚线表示夜间驾驶任务的较低安全感阈值[8],从图6中可以看住随着行驶速度的增加,该阈值亮度向更高的值移动。
3. 确定安全感亮度阈值
为确定不同速度水平下的安全亮度阈值,使用Linschoten等人定义的心理测量函数进行分析[9],通过化简本试验采用的心理测量函数如下:
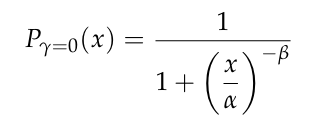
其中表示具有50%正响应概率(即“明亮”或更高评级)的平均道路亮度,定义曲线的陡峭度,应用于不同试验条件的逻辑回归模型的结果如图7所示。
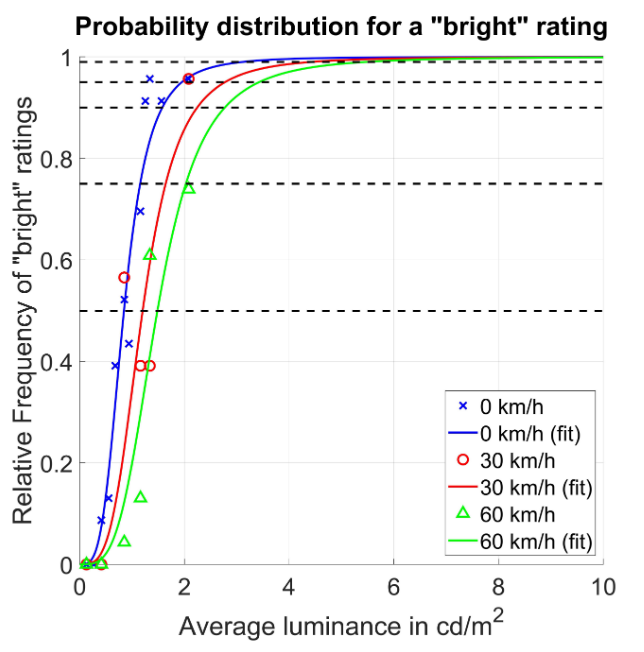
图7 不同行驶速度下“明亮”及更好评价的相对频率
“明亮”或更好评价的概率随着道路亮度的增加而增加,并且在更高的速度下必须有更高的道路亮度,以保持相同的概率水平。从图8所示的心理测量函数的倒数可以进一步确定达到超过标准50%阈值的特定概率水平所需的平均道路亮度。为了最大限度地提高驾驶员的总体安全感,在实践中可能会用到更大的概率阈值,例如75%、90%或99%。
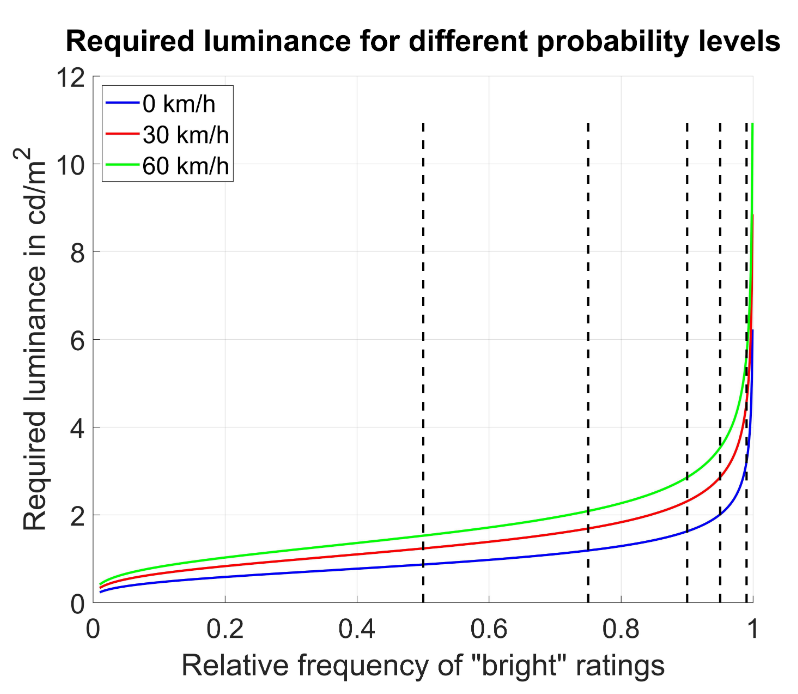
图8 不同速度下不同概率等级的获得“明亮”及以上评价所需的亮度
为了更详细地研究这种规律,并推算出更高的速度下亮度的阈值,对现有数据进行简单的线性回归分析,包括四个常见的概率阈值,即50%、75%、90%和99%。各回归曲线如图9所示。相应的确定系数始终大于0.99,确定了行驶速度和所需道路亮度之间的线性关系,以达到“明亮”及以上评价的特定评估等级,从而确保充分的安全感。
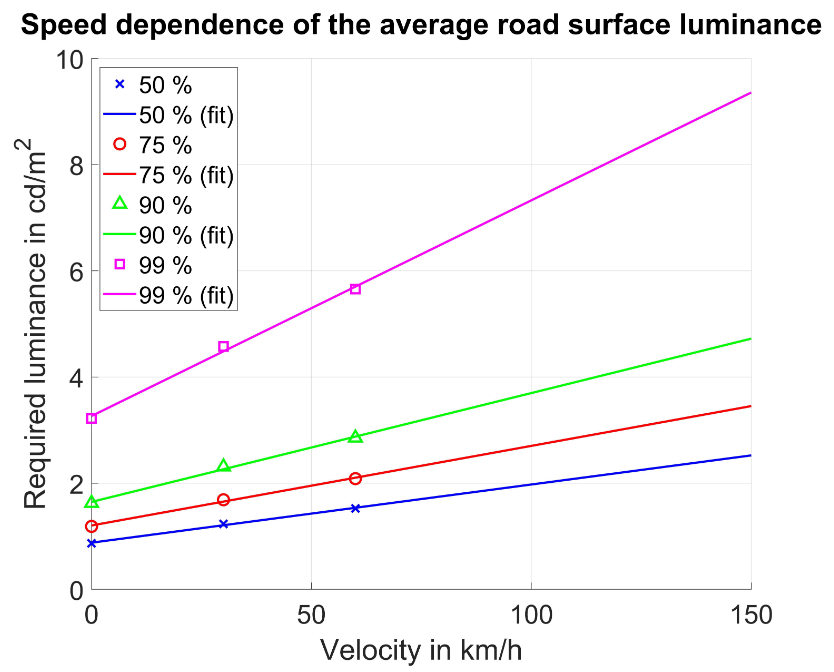
图9 四种概率阈值下不同速度所需的平均道路亮度
从不同概率阈值获得的回归斜率来看,在更高的阈值下,可以观察到所需道路亮度的急剧增加,表1显示了根据相应回归方程确定的某些中等和更高速度水平下不同概率阈值的所需亮度值。
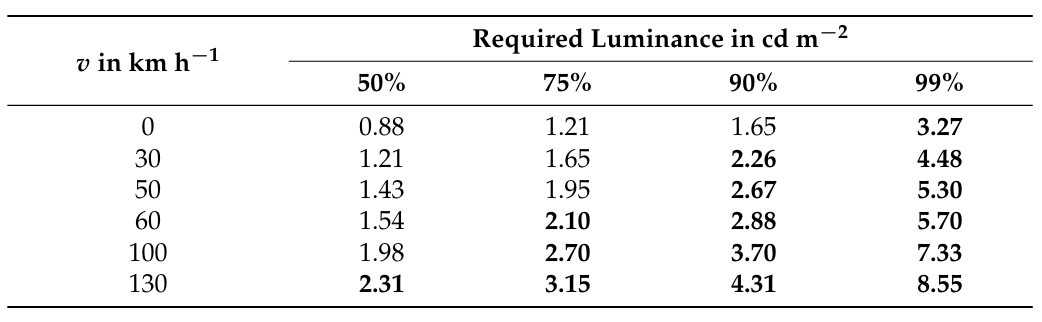
表1 不同速度水平下不同概率阈值所需的平均道路亮度值
表中粗体数字表示使用的标准LED前照灯无法提供道路亮度的情况,即在130 km/h的行驶速度下超过50%的受试者认为现有的照明道路“黑暗”或道路照明更差。这会导致安全感显著降低,并且在高速行驶时很可能会降低识别和处理重要信息和危险的效率。此外,除了静态情况外,在其他速度条件下,至少90%的受试者会将道路评估为“明亮”或更好。这表明,标准LED近光灯系统通常不适合在高速公路和乡村道路上常见的高速行驶。即使在中等速度下,当前一代的前照灯系统也不是最优的,因此非常需要在主观安全要求和客观夜间驾驶性能方面进行进一步优化。
-结论-
Erkan等人的研究确定了与速度相关的最小道路亮度,以便驾驶员在夜间驾驶时有充足的安全感。研究结果表明,在静态情况下为了让50%的受试者感觉到道路明亮,要求车辆前方32米范围内的平均道路亮度为0.88 cd/m^2。此外,行驶速度对最小道路亮度也有显著影响。例如,在60 km/h时,亮度必须增加到1.54 cd/m^2,50%的受试者才能感觉到道路照明充分,有足够的安全感。
文献来源:
[1] Erkan, A.; Babilon, S.; Hoffmann, D.; Singer, T.; Vitkov, T.; Khanh, T.Q. Determination of Speed-Dependent Roadway Luminance for an Adequate Feeling of Safety at Nighttime Driving. Vehicles 2021, 3, 821–839. https://doi.org/10.3390/ vehicles3040049.
[2] Sivak, M. The information that drivers use: Is it Indeed 90 % visual? Perception 1996, 25, 1081–1089. doi:10.1068/p251081.
[3] Fotios, S.; Gibbons, R. Road lighting research for drivers and pedestrians: The basis of luminance and illuminance recommendations. Light. Res. Technol. 2018, 50, 154–186. doi:10.1177/1477153517739055.
[4] Wagner, M.; Khanh, T.Q. Sicher durch die nächtliche Stadt – Helligkeits- und Kontrastwahrnehmung in der städtischen Straßenbeleuchtung aus Fahrersicht. Licht 2020, 72, 108–113.
[5] Peña-García, A.; Hurtado, A.; Aguilar-Luzón, M.C. Impact of public lighting on pedestrians’ perception of safety and well-being. Saf. Sci. 2015, 78, 142–148. doi:10.1016/j.ssci.2015.04.009.
[6] Kleinkes, M. Objektivierte Bewertung des Gütemerkmals Homogenität für Scheinwerfer-Lichtverteilungen, 1st ed.; Berichte aus der Physik, Shaker: Aachen, Germany, 2003.
[7] Kobbert, J. Optimization of Automotive Light Distributions for Different Real Life Traffic Situations. Ph.D. Thesis, Technical University of Darmstadt, Darmstadt, Germany, 2019. Available online: https://tuprints.ulb.tu-darmstadt.de/8382/ (accessed on 25 October 2021).
[8] Wagner, M.; Khanh, T.Q. Sicher durch die nächtliche Stadt – Helligkeits- und Kontrastwahrnehmung in der städtischen Straßenbeleuchtung aus Fahrersicht. Licht 2020, 72, 108–113.
[9] Linschoten, M.R.; Harvey, L.O.; Eller, P.M.; Jafek, B.W. Fast and accurate measurement of taste and smell thresholds using a maximum-likelihood adaptive staircase procedure. Percept. Psychophys. 2001, 63, 1330–1347. doi:10.3758/BF03194546.
文章转自 公众号 IFAL



发表评论 取消回复